
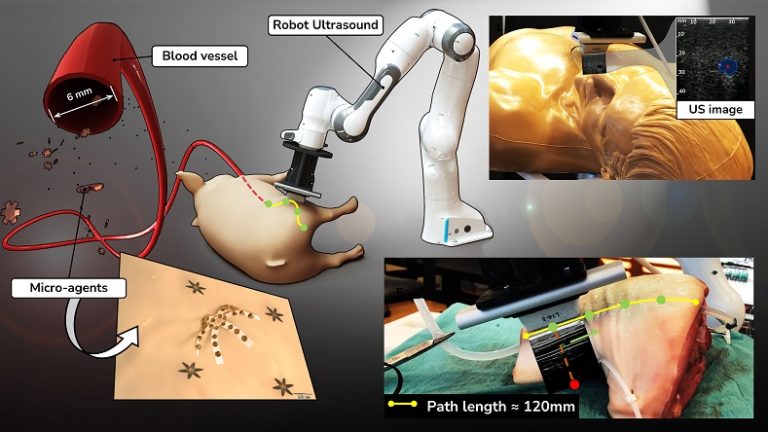
This study demonstrates intravascular micro-agent visualization aided by robotic ultrasound-based tracking and visual servoing, useful to many clinically-relevant scenarios.
Among the various potential clinically-relevant scenarios cited in this paper, we establish a dedicated strategy to address Carotid endarterectomy (CEA). CEA is a procedure used to treat carotid disease caused by a buildup of plaque in arteries that deliver blood to the brain. As an alternative to the conventional procedure, our methodology entails the use of remotely deployed clinical micro-agents loaded with statins that can be injected into the radial artery. These micro-agents are picked up by the remote actuation system under the guidance of a clinical imaging system and guided through the axillary artery to reach the site of the plaque for targeted drug delivery. In order to achieve this, we propose a novel path planning algorithm which uses only intraoperative data, a surface point cloud acquired using a 3D camera that is registered to the underlying vessels segmented from US images. Furthermore, we present an innovative approach for intravascular ultrasound-based micro-agent tracking and visual servoing in clinically-relevant scenarios. To the best of our knowledge, this study is the first to demonstrate visual servoing using micro-agents (of sub-millimeter-range) located inside the biological specimen and the anthropomorphic phantom while simulating physiological functions like breathing and blood flow.
Experiments performed using anthropomorphic surfaces, biological tissue, simulation of physiological movement and simulation of fluid flow through the vessels indicate that robust visualization and tracking of micro-agents involving human patients is an achievable goal.