Intravascular Tracking of Micro-Agents Using Medical Ultrasound: Towards Clinical Applications
https://www.embs.org/tbme/wp-content/uploads/sites/19/2022/11/TBME-01057-2021-Website_Image.jpg
789
444
IEEE Transactions on Biomedical Engineering (TBME)
//www.embs.org/tbme/wp-content/uploads/sites/19/2022/06/ieee-tbme-logo2x.png
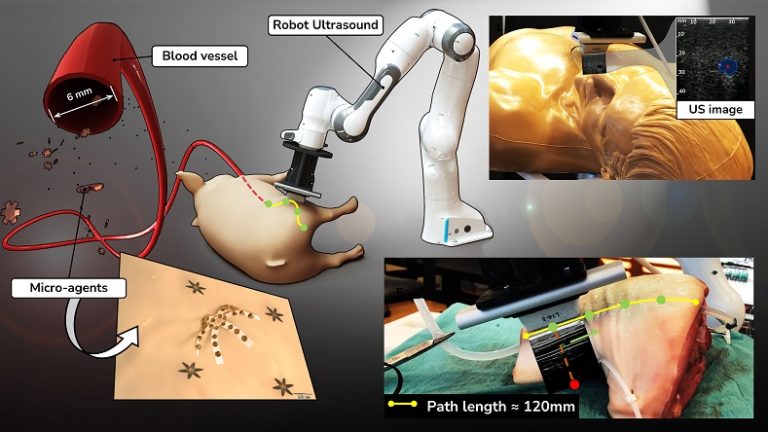
This study demonstrates intravascular micro-agent visualization by utilizing robotic ultrasound-based tracking and visual servoing in clinically-relevant scenarios (using biological tissue, simulation of physiological movement and fluid flow through the vessels).
read more