
Powered and passive exoskeletons have successfully reduced the metabolic cost of steady state walking, especially when assistance is personalized to the user. To translate these successes toward community ambulation two things must happen: (1) viable assistance profiles must be found across varying locomotion modes (speed, grade, etc.) found in everyday walking and (2) hardware must be designed with energetic constraints and torque requirements in mind. In this study, we begin to address each of these challenges by emulating a novel semi-active hip exoskeleton device and optimizing its hardware/control properties (spring stiffness and equilibrium angle) across a range of functional walking speeds.
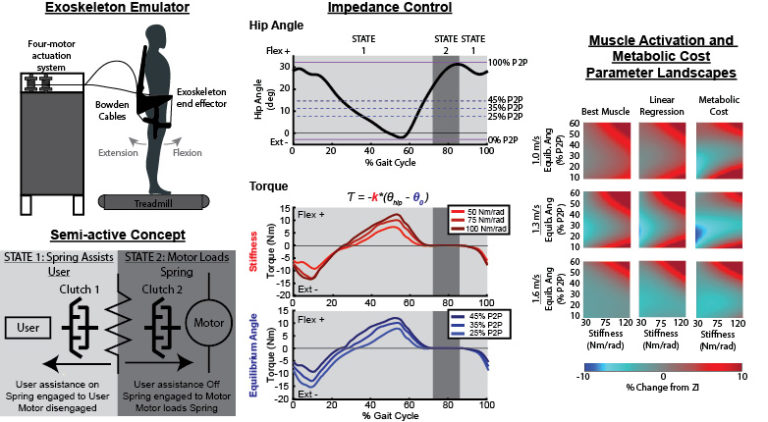
We employed an impedance controller to assist hip extension and flexion with a zero-impedance phase during late swing. Each participant habituated to the device for 1 hour before parameter optimization. At each walking speed (1.0, 1.3, and 1.6 m/s), we swept 30 randomized combinations of spring stiffness (30-120 Nm/rad) and equilibrium angle (10-60% of peak-to-peak hip angle with peak extension at 0%) for 2 minutes each while recording metabolic cost and muscle activity. We then compared the metabolic cost of speed-specific optimal assistance and walking without assistance at each speed.
Personalized assistance reduced metabolic cost by ~10% across all speeds compared to walking in the emulator with zero-impedance and provided higher reductions compared to average-best assistance, especially at 1.6 m/s. Optimal semi-active assistance required stiffer springs and extension-biased equilibrium angles with increasing walking speed. We also found changes in muscle activity significantly correlated with metabolic cost, especially with muscles local to the hip. This is the first study to optimize semi-active hip exoskeleton assistance across walking speeds to reduce metabolic cost. We found personalization is important and online tuning can focus on minimizing local muscle activity to generate metabolic benefits.