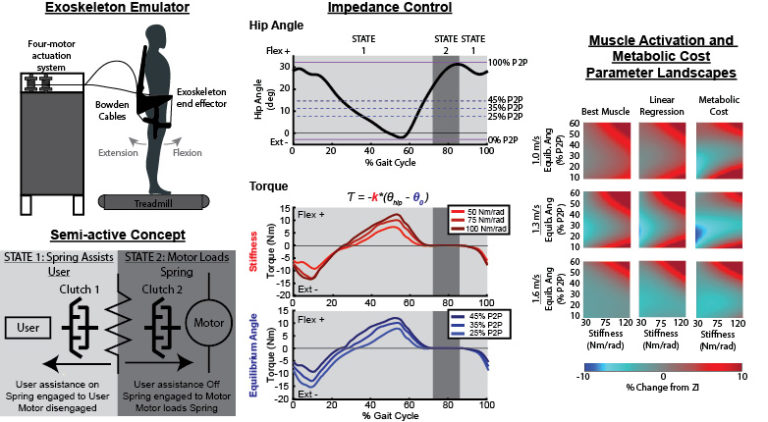
Emulator-Based Optimization of a Semi-Active Hip Exoskeleton Concept: Sweeping Impedance Across Walking Speeds
https://www.embs.org/tbme/wp-content/uploads/sites/19/2022/12/TBME-02147-2021-Website_Image.jpg
782
430
IEEE Transactions on Biomedical Engineering (TBME)
//www.embs.org/tbme/wp-content/uploads/sites/19/2022/06/ieee-tbme-logo2x.png
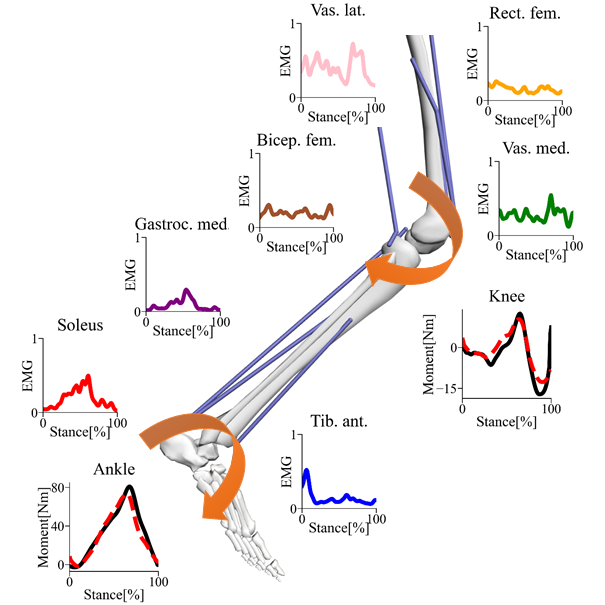
This is the first study to optimize semi-active hip exoskeleton assistance across walking speeds to reduce metabolic cost. We found personalization is important and online tuning can focus on minimizing local muscle activity.
read more