
Users of passive knee-ankle prosthetics need to employ compensatory strategies such as hip hiking or circumduction to navigate obstacles and stairs during daily locomotion, which leads to inefficiencies and potential musculoskeletal issues. Although powered prostheses offer improved biomechanics, they often lack crucial environmental awareness. This deficiency leads to an increased risk of accidental stubbing against obstacles, causing falls or requiring unnatural gait adjustments.
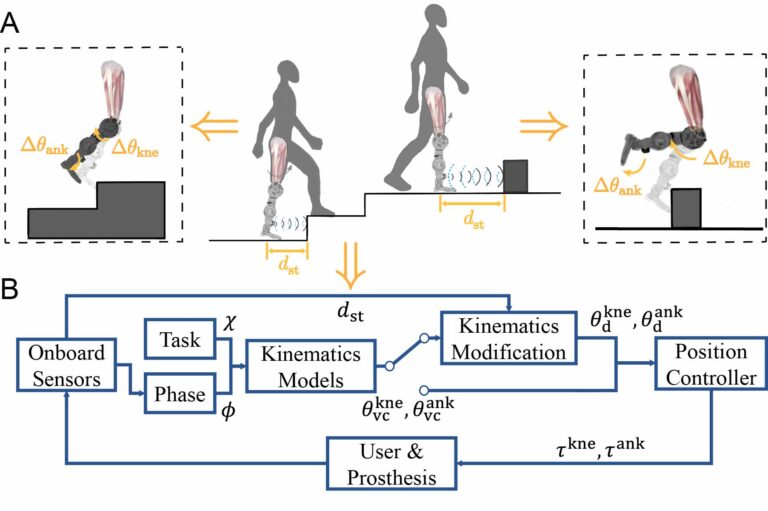
Addressing this gap, the paper presents a novel stub avoidance controller for the powered knee-ankle prosthesis, employing a small, lightweight, low-power, low-cost ultrasonic sensor mounted above the prosthetic ankle. Incorporating the distance information as input to the controller enables the prosthetic to automatically adjust the kinematics of the knee and ankle joints, significantly reducing the necessity for the user to make compensatory movements and thereby promoting a more natural walking pattern.
The efficacy of this system was tested in a case study with two transfemoral amputees. The experiment results demonstrated an 89.95% reduction in stubbing incidents during stair ascents (with risky foot placement close to the stairs) and an 87.5% success rate in avoiding obstacles on level ground, all without necessitating additional compensatory thigh movements from the participants. These outcomes underscore the potential of integrating environmental perception capabilities into powered prosthetic systems. By incorporating these capabilities, the system offers a practical solution for overcoming one of the main challenges faced by amputee users in daily navigation. The findings suggest that such advancements could greatly improve the quality of life for individuals with limb loss, enabling them to more confidently and comfortably walk in diverse environments.