
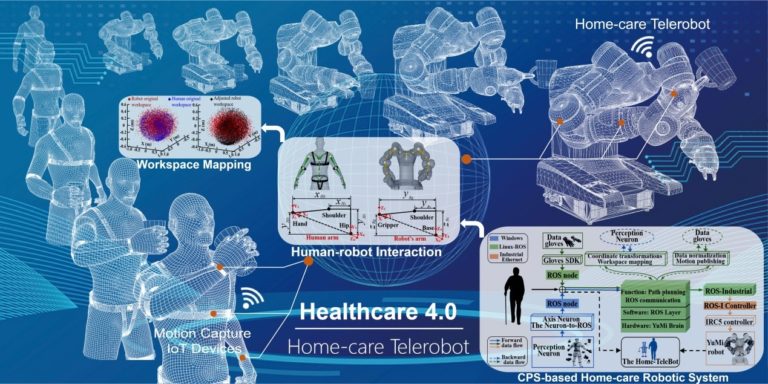
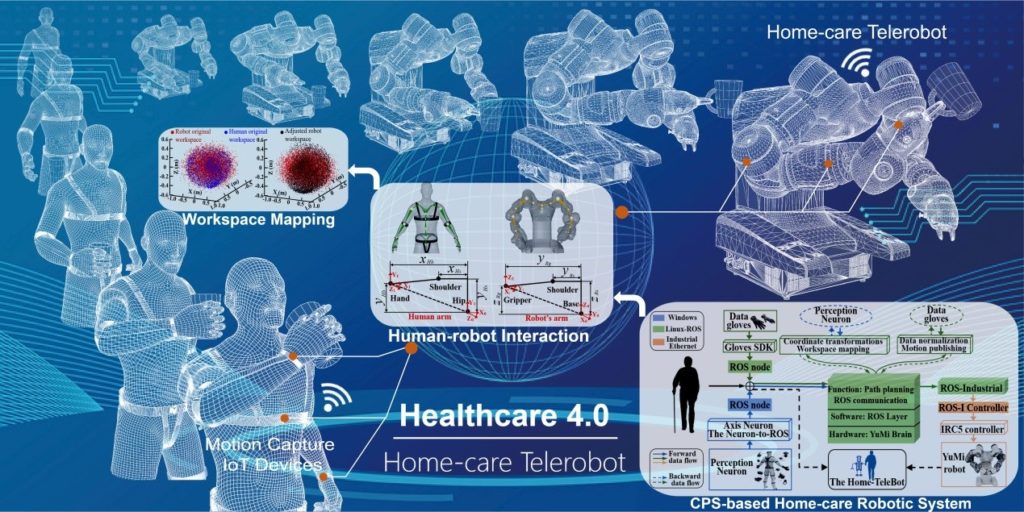
With the paradigm shift from hospital-centric healthcare to home-centric healthcare in Healthcare 4.0, healthcare robotics has become one of the fastest growing fields of robotics. The combination of robot capabilities with human intelligence, for example, telerobotics for home care, is gradually showing promising potentials. In this paper, the Home-TeleBot system, a generalized IoT-enabled telerobotic architecture designed to support home-centric healthcare system, is proposed. In particular, the implementation of it is realized by integrating human-motion-capture subsystem with robot-control subsystem. The dual-arm cooperative robot, YuMi, imitates human motion captured by a set of wearable inertial motion capture devices to complete tasks. The proposed approach using workspace mapping and path planning of robot manipulators, facilitates telerobot to execute tasks in a natural and human-like way. Based on the constant of proportionality calculated by comparing the human original workspace with the robot original workspace, the workspace mapping is achieved by making assumptions of the distance between end-effectors (human hands, robot’s grippers) and shoulders. Additionally, robot manipulators’ path is planned by setting virtual obstacles to constrain robot motion, which aims to improve the performance of robot’s human-like motion. As a specific example of application, we apply the proposed architecture to a fetching task based on dual-arm motion capture and mapping for telerobotics in home care.