
Marco Beccani, Christian Di Natali, Levin J. Sliker, Jonathan A. Schoen, Mark E. Rentschler, and Pietro Valdastri
Vanderbilt University & University of Colorado
Volume 61, Issue 2, Page: 353-361
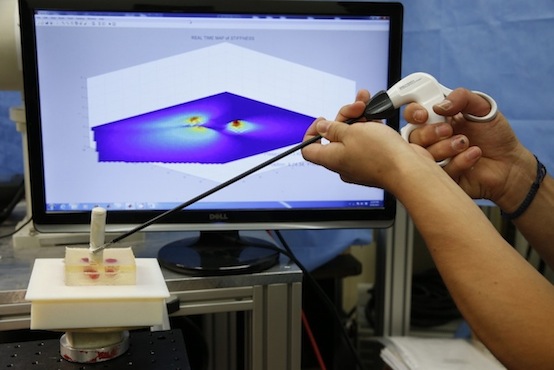
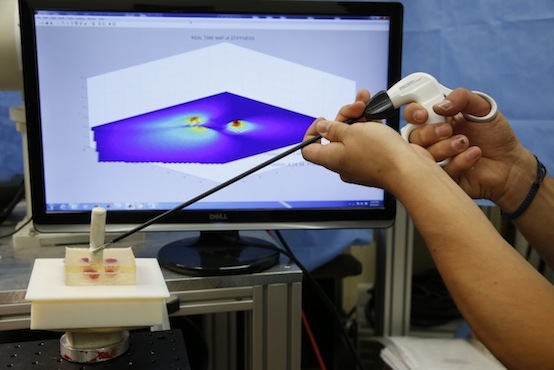
In an open surgery, identification of precise margins for curative tissue resection is performed by manual palpation. This is not the case for minimally invasive and robotic procedures, where tactile feedback is either distorted or not available. In this work, we introduce the concept of intraoperative wireless tissue palpation.
The wireless palpation probe (WPP) is a cylindrical device (15 mm 12 in diameter, 60 mm in length) that can be deployed through a trocar incision and directly controlled by the surgeon to create a volumetric stiffness distribution map of the region of interest. This map can then be used to guide the tissue resection to minimize healthy tissue loss. The wireless operation prevents the need for a dedicated port and reduces the chance of instrument clashing in the operating field.
The WPP is able to measure in real time the indentation pressure with a sensitivity of 34 Pa, the indentation depth with an accuracy of 0.68 mm, and the probe position with a maximum error of 11.3 mm in a tridimensional workspace. The WPP was assessed on the benchtop in detecting the local stiffness of two different silicone tissue simulators (elastic modulus ranging from 45 to 220 kPa), showing a maximum relative error below 5%. Then, in vivo trials were aimed to identify an agar-gel lump injected into a porcine liver and to assess the device usability within the frame of a laparoscopic procedure. The stiffness map created intraoperatively by the WPP was compared with a map generated ex vivo by a standard uniaxial material tester, showing less than 8% local stiffness error at the site of the lump.