
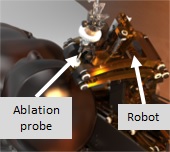
Treatment of brain tumors requires high precision to ensure sufficient treatment while minimizing damage to surrounding healthy tissue. Ablation of such tumors using needle-based therapeutic ultrasound (NBTU) under real-time magnetic resonance imaging (MRI) can fulfill this need. However, the constrained space and strong magnetic field in the MRI bore restricts patient access limiting precise placement of the NBTU ablation tool. A surgical robot compatible with use inside the bore of an MRI scanner can alleviate these challenges. This paper presents preclinical trials of a robotic system for NBTU ablation of brain tumors under real-time MRI guidance. The system comprises of an updated robotic manipulator and corresp2zonding control electronics, the NBTU ablation system and applications for planning, navigation, and monitoring of the system. The integrated robotic system can place NBTU ablator at a desired target location in porcine brain and monitor the ablation in real-time via magnetic resonance thermal imaging (MRTI). The robotic system had a mean translational and rotational accuracy of 1.39±0.64 mm and 1.27±0.56° in gelatin phantoms and 3.13±1.41 mm and 5.58±3.59° in 10 porcine trials while causing a maximum reduction in signal to noise ratio (SNR) of 10.3%. Further optimization of this system could result in a clinically viable system for use in human trials for various diagnostic or therapeutic neurosurgical interventions.