
The Human Machine Interface (HMI) of intraluminal robots has a crucial impact on the clinician’s performance. It increases or decreases the difficulty of the tasks, and is connected to the users’ physical and mental stress. Considering the wide range of HMIs developed in the last decades for robotic colonoscopes, it is hard to determine which is the optimal one. Indeed, the terms “ergonomic”, “intuitive”, and “user-friendly” are used across several scientific articles with different meanings and refer to different characteristics of the final interface.
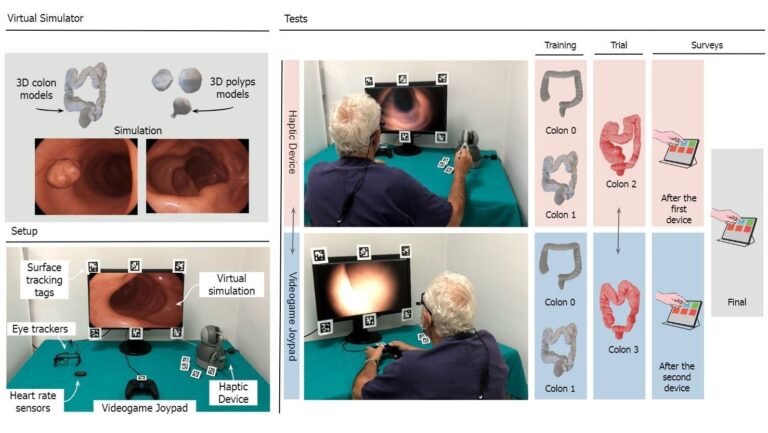
To address this challenge, we designed a modular framework for the thorough investigation, analysis, and comparison of different HMIs for robotic colonoscopy. The framework includes (1) an open and modular virtual simulator of robotic colonoscopy, (2) wearable sensors to measure the clinicians’ cognitive load, (3) a data collection, analysis and synchronization unit, and (4) surveys to evaluate the users’ experience. This comprehensive framework enables to analyse in detail the different aspects of the HMI to determine the optimal interface in terms of clinical outcome, intuitiveness, user-friendliness, and ergonomics.
The framework was tested with 42 clinicians investigating the optimal device for tele-operated control of robotic colonoscopes. Two control devices were selected and compared, i.e. a haptic serial-kinematic device and a standard videogame joypad. Although the haptic device was preferred by endoscopists, the joypad demonstrated superior clinical performance and reduced cognitive and physical load.
Expanding beyond the specific devices examined, our proposed platform and experimental protocol are intended for testing different HMI components, encompassing both hardware and software. The insights gained from this study, along with future research utilizing this framework, are poised to inform the design and development of next-generation HMIs for intraluminal robots. This advancement aims to enhance clinical performance, alleviate physical and mental stress for clinicians, and ultimately contribute to better patient outcomes.