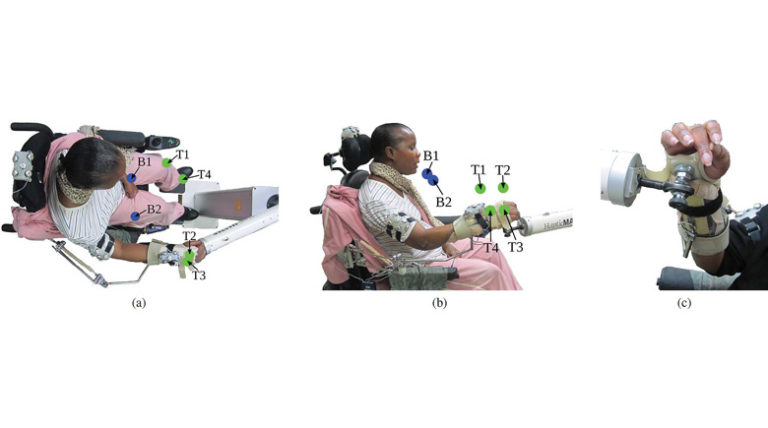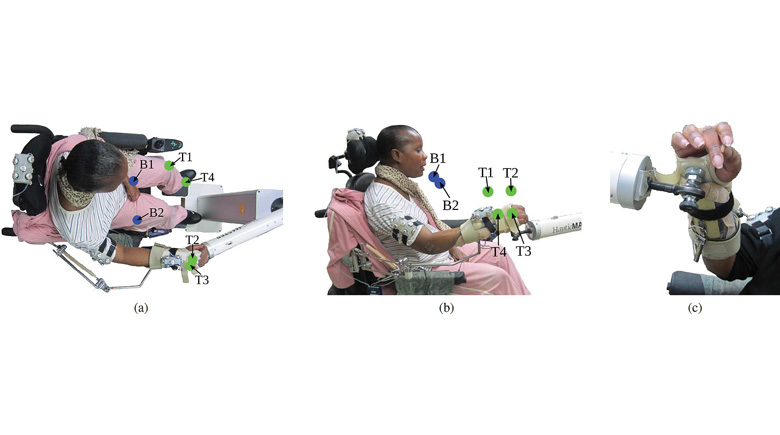
We present a method to identify the dynamics of a human arm controlled by an implanted functional electrical stimulation neuroprosthesis. The method uses Gaussian process regression to predict shoulder and elbow torques given the shoulder and elbow joint positions and velocities and the electrical stimulation inputs to muscles. We compare the accuracy of torque predictions of nonparametric, semiparametric, and parametric model types. The most accurate of the three model types is a semiparametric Gaussian process model that combines the flexibility of a black box function approximator with the generalization power of a parameterized model. The semiparametric model predicted torques during stimulation of multiple muscles with errors less than 20% of the total muscle torque and passive torque needed to drive the arm. The identified model allows us to define an arbitrary reaching trajectory and approximately determine the muscle stimulations required to drive the arm along that trajectory.