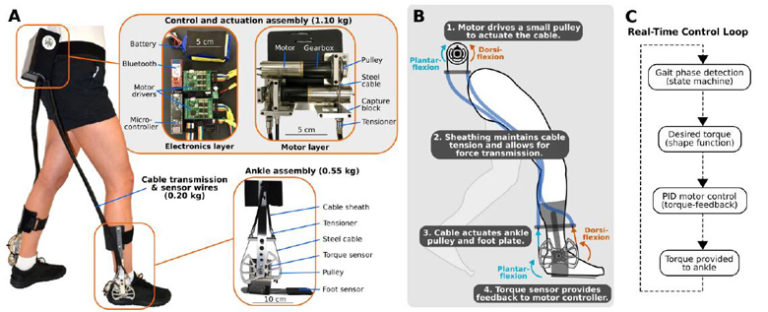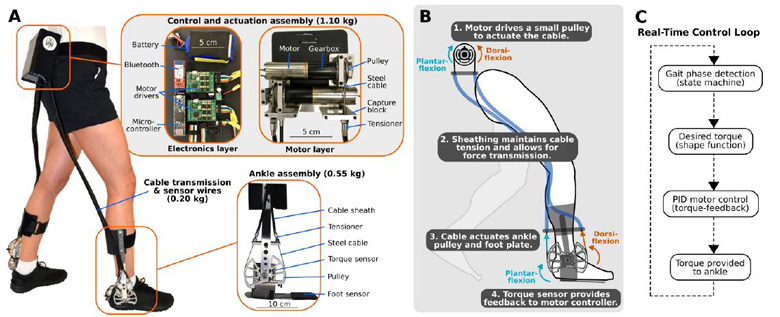
The high energy cost of walking in individuals with cerebral palsy (CP) contributes significantly to reduced mobility and quality of life. The purpose of this study was to develop and clinically evaluate an untethered ankle exoskeleton with the ability to reduce the metabolic cost of walking in children and young adults with gait pathology from CP. We designed a battery-powered device consisting of an actuator-and-control module worn above the waist with a Bowden cable transmission used to provide torque to pulleys aligned with the ankle. Special consideration was made to minimize adding mass to the body, particularly distal portions of the lower-extremity. The exoskeleton provided plantar-flexor assistance during the mid-to-late stance phase, controlled using a real-time control algorithm and embedded sensors. We conducted a device feasibility and a pilot clinical evaluation study with five individuals with CP ages five through thirty years old. Participants completed an average of 130 minutes of exoskeleton-assisted walking practice. We observed a 19 ± 5% improvement in the metabolic cost of transport (p = 0.011) during walking with untethered exoskeleton assistance compared to how participants walked normally. These preliminary findings support the future investigation of powered ankle assistance for improving mobility in this patient population.