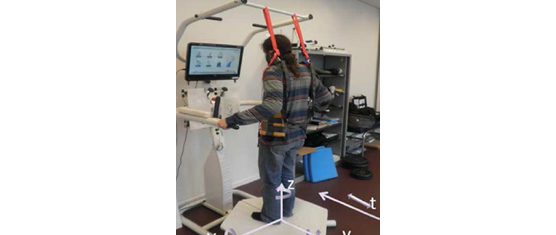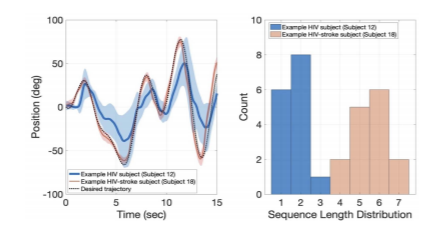
Robot-Based Assessment of HIV-Related Motor and Cognitive Impairment for Neurorehabilitation
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2021/03/Capture-3.png
448
227
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
There is a pressing need for strategies to slow or treat the progression of functional decline in people living with HIV. This paper explores a novel rehabilitation robotics approach to…
read more