

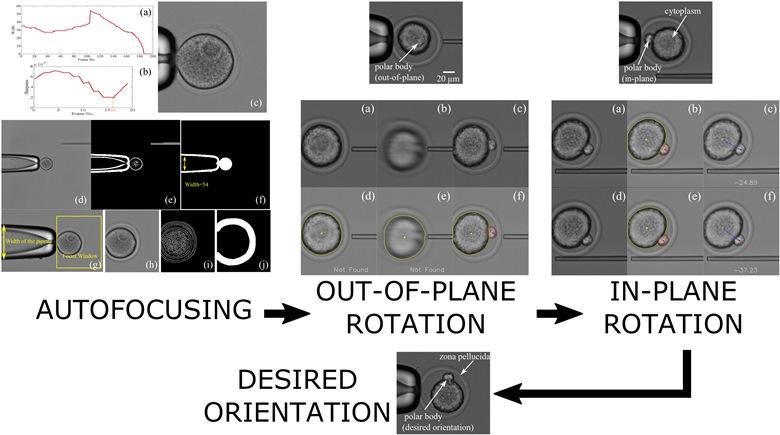
Both injection and biopsy of a mammalian cell require positioning and orientation of a biological cell in a three-dimensional space under a microscope. Rotating an oocyte to a desired orientation to avoid damage to the polar body is a necessary step in Introcytoplasmic sperm injection (ICSI). Manual oocyte orientation is the most commonly used method that is based on a trial-and-error and direct cell poking approach. In this paper, we present a system that is able to perform autofocusing on both micropipettes and the oocyte, detect the presence of the polar body, determine the in-plane orientation of a polar body when an oocyte is rotating, and rotate the oocyte based on pressure control and computer vision feedback. The system solves the problems, such as low efficiency, or success rate and inconsistent output, faced in manual cell manipulation. Experimental results demonstrates that the system’s capability for intracellular structure recognition and fast oocyte orientation(11 s/cell). A rotation is considered successful if the polar body is rotated to approximately ±90° from the y axis. Out of 80 samples, the system achieved a 94% success rate in the out-of-plane rotation and a 95% success rate in the in-plane rotation. To summarize, the proposed system allows high speed, high controllable and non-invasive three-dimensional rotational control of a single oocyte and provides a starting point for fast autofocusing and oocyte orientation prior to automatic ICSI or cell biopsy. Future work will focus on image processing and detailed force analysis to improve the success rate, the precision and the efficiency of the system.