
In this study, we assessed the feasibility of a knee exoskeleton to mitigate hyperextension and increase swing range of motion in five children/adolescents who presented with unilateral genu recurvatum due to neurological deficits. Genu recurvatum, or knee hyperextension, is a complex gait pattern with a variety of etiologies, and is often connected with knee weakness, lack of motor control, and spasticity. Because of the atypical forces placed on the soft tissues, early treatment or prevention of knee hyperextension may help prevent further degradation of the knee joint.
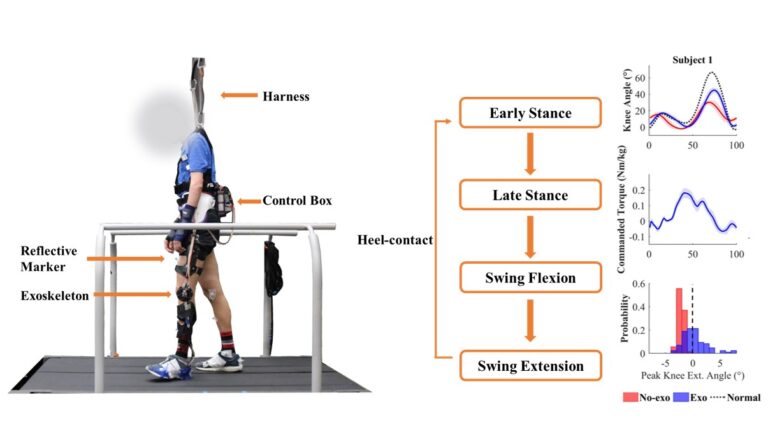
We utilized an autonomous powered knee exoskeleton and developed a finite-state machine to detect the user’s walking state in real-time, and each state served to guide the user’s knee joint kinematics to be closer to the able-bodied pattern. Over the course of three visits, each participant practiced walking with the exoskeleton, which provided torque assistance in knee extension/flexion during both stance and swing based on an impedance control law. TO evaluate the effectiveness of exoskeleton assistance, we compared the knee joint kinematics and spatio-temporal symmetry measures between walking with the exoskeleton and without the exoskeleton.
In final validation trials, the exoskeleton was effective in reducing knee hyperextension (0.2 ± 4.7° average peak knee extension without the exoskeleton to 9.9 ± 10.3° with the exoskeleton) and improving the swing range of motion by 14.0 ± 4.5° increase on average. However, while the exoskeleton was effective in normalizing the kinematics, it did not lead to improved spatio-temporal asymmetry measures. This work showcases a promising potential application of a robotic knee exoskeleton for improving the kinematic characteristics of genu recurvatum gait.