
Dynamic modelling is an essential tool for the analysis of human movement, evaluations of prosthetics, and understanding biomechanics of injuries. These models estimate kinetic variables such as joint torques and forces, which cannot be directly measured. Traditional approaches use inverse dynamics, surface electromyography, or machine learning techniques to perform these estimations. Downfalls of these approaches include sensitivity to external factors, limitations to lab settings, and lack of real-time capabilities.
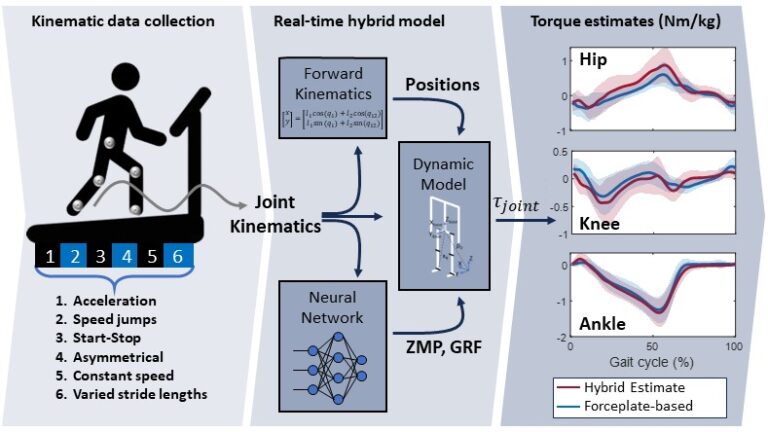
This study proposes a novel real-time hybrid model for joint torque estimator without relying on ground reaction force measurements by combining a feedforward neural network and an inverse dynamic model. The neural network uses kinematic measurements to estimate ground reaction forces and the center of pressure, which are then fed into the inverse dynamic model to estimate joint torques. An alternative approach using end-to-end mapping was also developed that uses kinematic data as inputs. The hybrid and end-to-end models are compared to a reference torque estimation based on the measurement of ground reaction forces and marker-based kinematics.
Experimental data collection included eleven participants walking on a split-belt instrumented treadmill while collecting forceplate and motion capture measurements. Each participant walked during the following conditions: constant speed, varied stride lengths, constant acceleration, speed jumps, asymmetrical gait, and start-stops. Leave-one-subject-out cross validation was used.
Both approaches were able to estimate joint torques. The end-to-end model outperformed the hybrid model when compared to the reference torque estimations. However, the hybrid model has significantly better performance than the end-to-end approach when tested on a participant wearing a lower limb exoskeleton. This indicates that the hybrid model better applies to scenarios that differ from the training data.