
Surgical drills are essential tools for boring holes in bone for medical screw fixation, removing bony tissues to access target surgical sites, removing decay, etc. However, the shafts of predominant surgical drills are straight (some with simple, pre-bent curves) and rigid, lacking distal dexterity. As a result, to access target surgical sites in deep anatomical areas, surgeons generally require making large incisions and removing considerable healthy tissues. Steerable surgical drills have the potential to minimize intraoperative tissue damage to patients. However, due to their large shaft diameters, large bend radii, and small bend angles, existing steerable drills are unsuitable for dexterous operations in confined spaces.
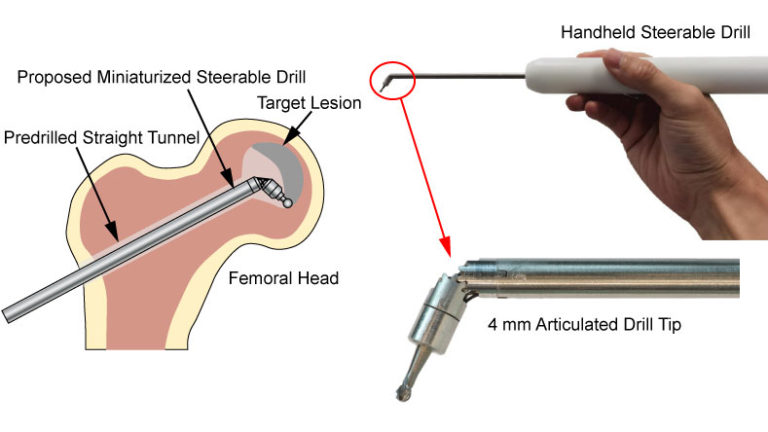
This article presents a handheld steerable drill with a 4.5-mm miniaturized tip, capable of abruptly bending up to 65 degrees. We propose a novel articulated joint module composed of a tendon-driven geared rolling joint and a double universal joint for steering the drill shaft and transmitting drilling torques, respectively. We integrate this joint module with a customized compact actuation unit into a handheld device. The integrated handheld steerable drill is slim and lightweight, supporting burdenless, single-handed grips and easy integration into existing surgical procedures.
Experiments and analysis showed the proposed steerable drill has high distal dexterity and is capable of removing target tissues dexterously through a small passage/incision with minimized collateral damage. The results suggest the potential of the proposed miniaturized articulated drill for dexterous bone work in confined spaces. Significance: By enhancing distal dexterity and reach for surgeons when dealing with hard bony tissues, the proposed device can potentially minimize surgical invasiveness and thus collateral tissue damage to patients for a better clinical outcome.