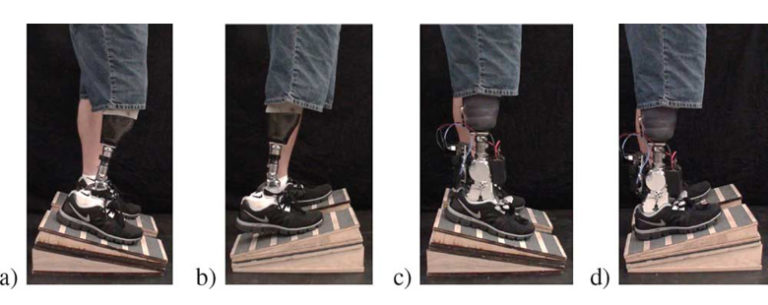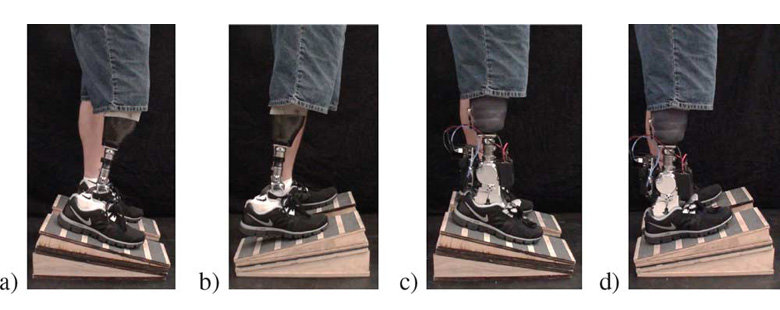
This paper describes a control approach that provides walking and standing functionality for a powered ankle prosthesis, and demonstrates the efficacy of the approach in experiments with a unilateral transtibial amputee subject. Both controllers incorporate a finite-state structure that emulates healthy ankle joint behavior via a series of piecewise passive impedance functions. The walking controller additionally modifies impedance parameters based on estimated cadence, while the standing controller modulates the ankle equilibrium angle in order to adapt to the ground slope and user posture, and the supervisory controller selects between the walking and standing controllers. The system is shown to reproduce several essential biomechanical features of the healthy joint during walking, particularly relative to a passive prosthesis, and is shown to adapt to various cadences. The system is also shown to adapt to slopes over a range of+/- 15°, providing support to the user, as validated by quasi-static stiffness measurements recorded by the prosthesis. The subject is shown to place more weight on the powered prosthesis than on his passive prosthesis when standing on sloped surfaces, particularly at angles of 10° or greater. The authors also demonstrated that the prosthesis typically began providing support within 1 s of initial ground contact. Further, the supervisory controller was shown to effectively switch between walking and standing, as well as determine ground slope just prior to the transition from the standing controller to the walking controller, where the estimated ground slope was accurate to within 1.25° for all trials.