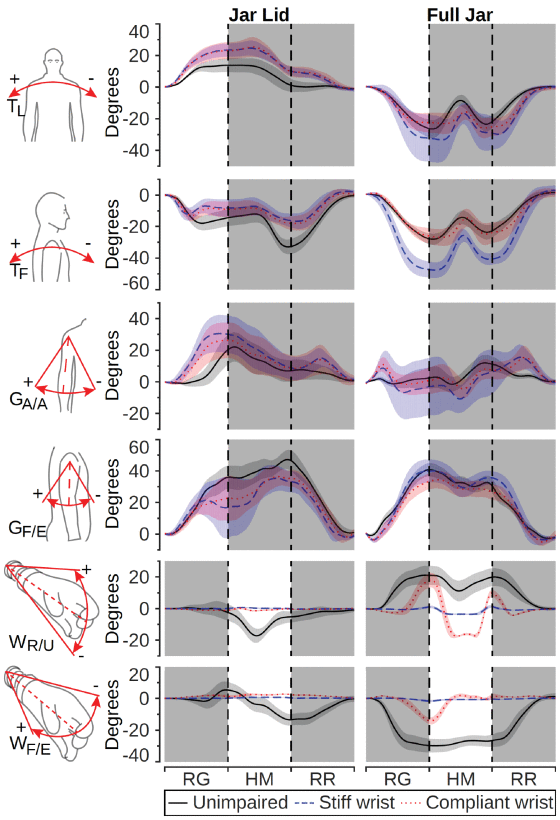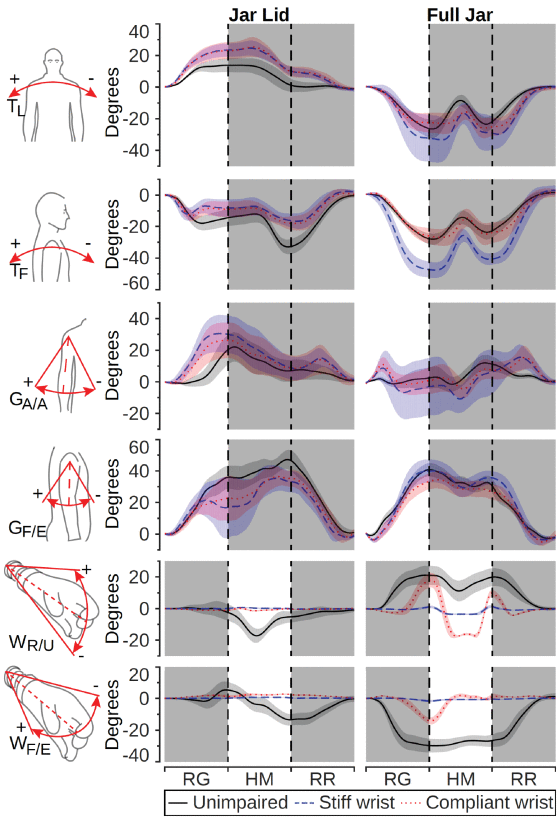
Developing an artificial arm with functions equivalent to those of the human arm is one of the challenging goals of bioengineering. State-of-the-art prostheses lack several degrees of freedom and force the individuals to compensate for them by means of compensatory movements, which often result in residual limb pain and overuse syndromes. Passive wrists may reduce such compensatory actions, nonetheless to date their actual efficacy, associated to conventional myoelectric hands is a matter of debate. We hypothesized that a transradial prosthesiswould allow a simpler operation if its wrist behaved compliant during the reaching and grasping phase, and stiff during the holding and manipulation phase. To assess this, we compared a stiff and a compliant wrist and evaluating the extent of compensatory movements in the trunk and shoulder, with unimpaired subjects wearing orthoses, while performing nine activities of daily living taken from the southampton hand assessment procedure. Our findings show indeed that the optimal compliance for a prosthetic wrist is specific to the phase of the motor task: the compliant wrist outperforms the stiff wrist during the reaching phase, whereas the stiff wrist exhibits more natural movements during the manipulation phase of heavy objects. Hence, this paper invites rehabilitation engineers to develop wrists with switchable compliance.