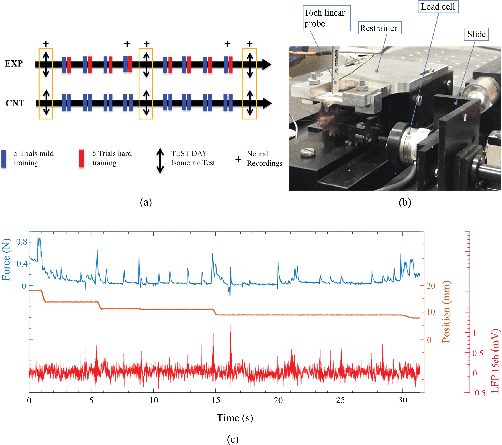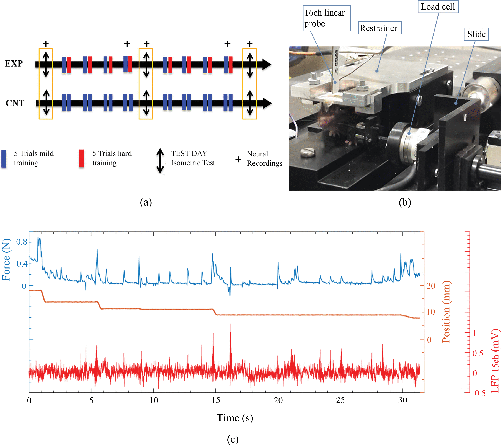
Rodent models are decisive for translational research in healthy and pathological conditions of motor function thanks to specific similarities with humans. Here, we present an upgraded version of the M-Platform, a robotic device previously designed to train mice during forelimb retraction tasks. This new version significantly extends its possibilities for murine experiments during motor tasks: 1) an actuation system for friction adjustment allows to automatically adapt pulling difficulty; 2) the device can be used both for training, with a retraction task, and for assessment, with an isometric task; and 3) the platform can be integrated with a neurophysiology systems to record simultaneous cortical neural activity. Results of the validation experiments with healthy mice confirmed that the M-Platform permits precise adjustments of friction during the task, thus allowing to change its difficulty and that these variations induce a different improvement in motor performance, after specific training sessions. Moreover, simultaneous and high quality (high signal-to-noise ratio) neural signals can be recorded from the rostral forelimb area (RFA) during task execution. With the novel features presented herein, the M-Platform may allow to investigate the outcome of a customized motor rehabilitation protocol after neural injury, to analyze task-related signals from brain regions interested by neuroplastic events and to perform optogenetic silencing or stimulation during experiments in transgenic mice.