
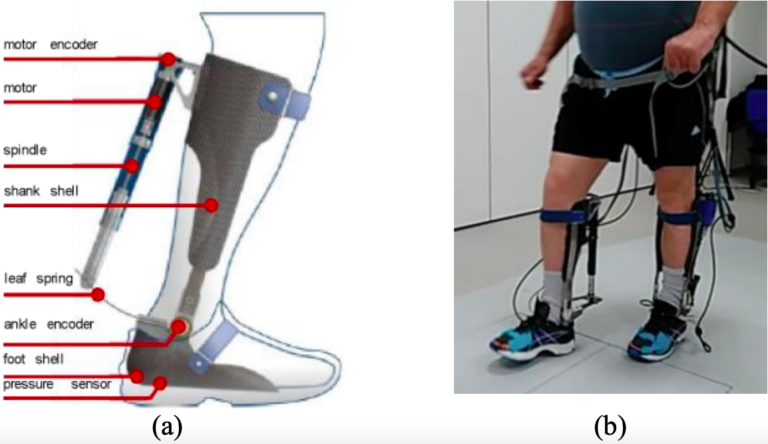
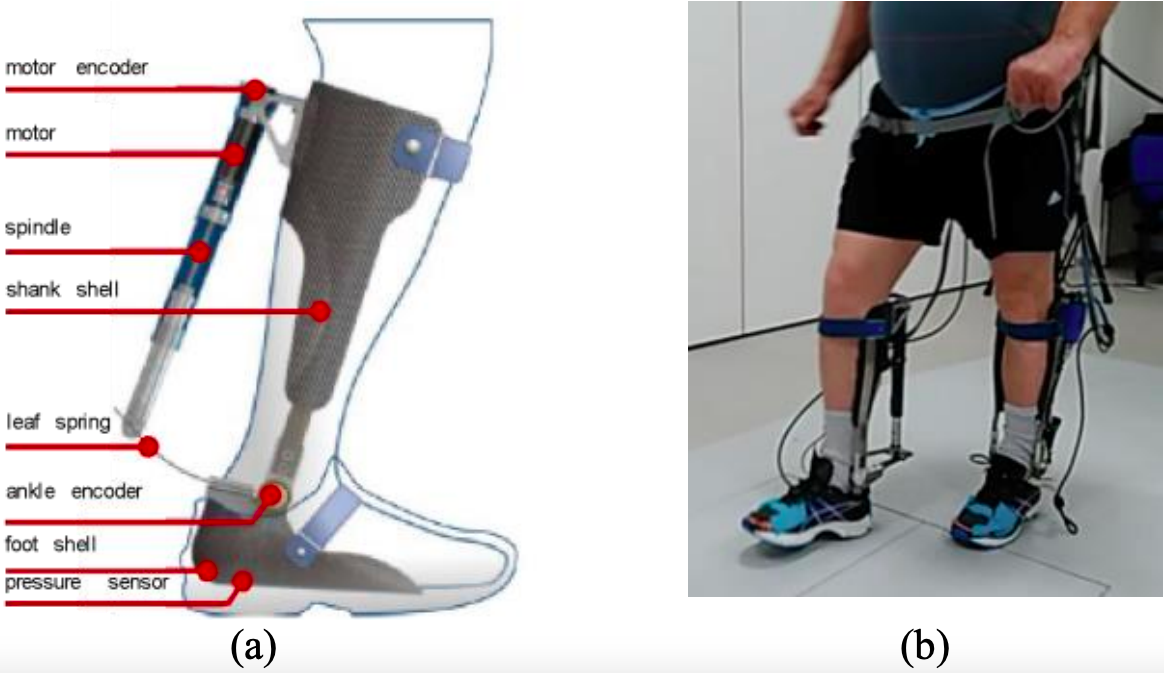
Powered exoskeletons are among the emerging technologies claiming to assist functional ambulation. The potential to adapt robotic assistance based on specific motor abilities of incomplete spinal cord injury (iSCI) subjects, is crucial to optimize Human-Robot Interaction (HRI). Achilles, an autonomous wearable robot able to assist ankle during walking, was developed for iSCI subjects and utilizes a NeuroMuscular Controller (NMC). NMC can be used to adapt robotic assistance based on specific residual functional abilities of subjects. The main aim of this pilot study was to analyze the effects of the NMC-controlled Achilles, used as an assistive device, on chronic iSCI participants’ performance, by assessing gait speed during 10-session training of robot-aided walking. Secondary aims were to assess training impact on participants’ motion, clinical and functional features and to evaluate subjective perspective in terms of attitude towards technology, workload, usability and satisfaction. Results showed that 5 training sessions were necessary to significantly improve robot-aided gait speed on short paths and consequently to optimize HRI. Moreover, the training allowed participants who initially were not able to walk for 6 minutes, to improve gait endurance during Achilles-aided walking and to reduce perceived fatigue. Improvements were obtained also in gait speed during free walking, thus suggesting a potential rehabilitative impact, even if Achilles-aided walking was not faster than free walking. Participants’ subjective evaluations indicated a positive experience.