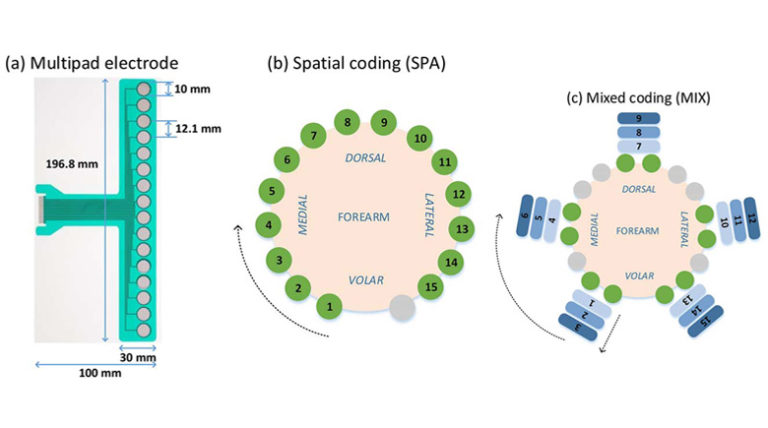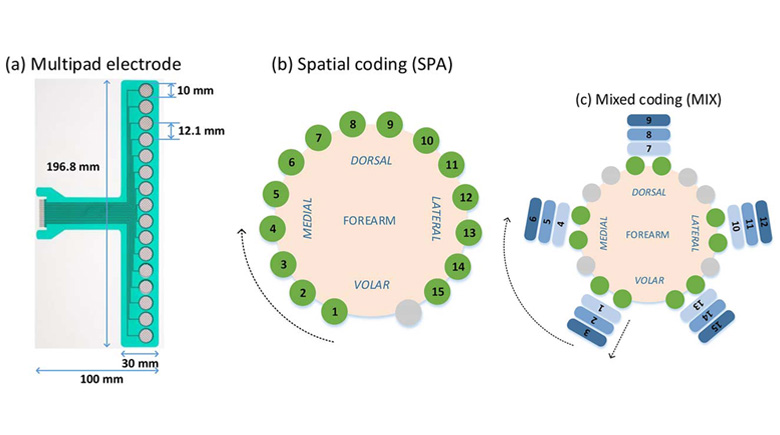
Providing somatosensory feedback to the user of a myoelectric prosthesis is an important goal since it can improve the utility as well as facilitate the embodiment of the assistive system. Most often, the grasping force was selected as the feedback variable and communicated through one or more individual single channel stimulation units (e.g., electrodes, vibration motors). In the present study, an integrated, compact, multichannel solution comprising an array electrode and a programmable stimulator was presented. Two coding schemes (15 levels), spatial and mixed (spatial and frequency) modulation, were tested in able-bodied subjects, psychometrically and in force control with routine grasping and force tracking using real and simulated prosthesis. The results demonstrated that mixed and spatial coding, although substantially different in psychometric tests, resulted in a similar performance during both force control tasks. Furthermore, the ideal, visual feedback was not better than the tactile feedback in routine grasping. To explain the observed results, a conceptual model was proposed emphasizing that the performance depends on multiple factors, including feedback uncertainty, nature of the task and the reliability of the feedforward control. The study outcomes, specific conclusions and the general model, are relevant for the design of closed-loop myoelectric prostheses utilizing tactile feedback.