
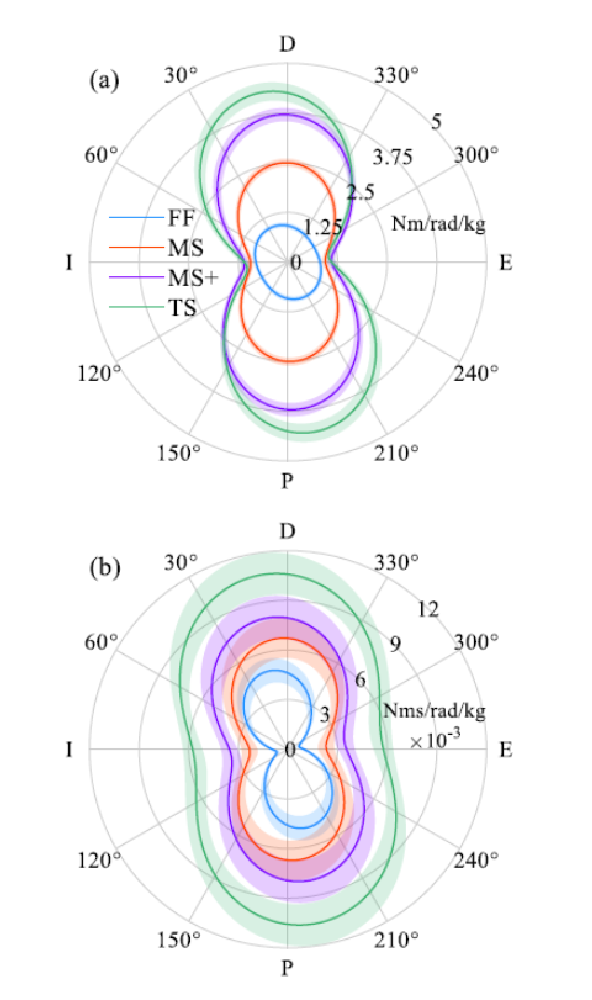
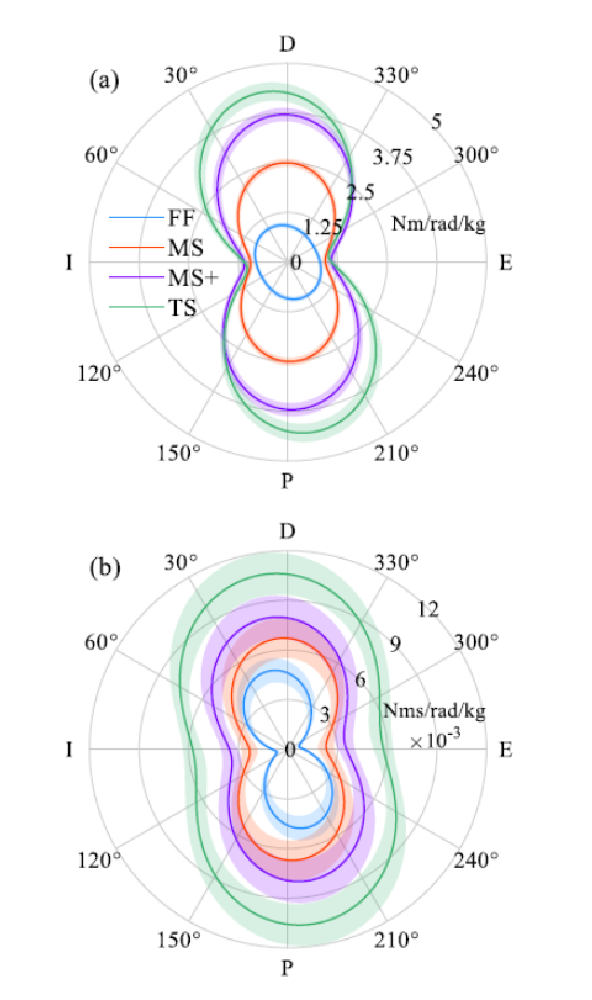
In this study, we estimated the multi-directional ankle mechanical impedance in two degrees-of-freedom (DOF) during standing, and determined how the stiffness, damping, and inertia vary with ankle angle and ankle torque at different postures. Fifteen subjects stood on a vibrating instrumented platform in four stationary postures, while subjected to pulse train perturbations in both the sagittal and frontal planes of motion. The four stationary postures were selected to resemble stages within the stance phase of the gait cycle: including post-heel-strike during the loading response, mid-stance, post-mid-stance, and just before the heel rises from the ground in terminal-stance phase. In general, the ankle stiffness and damping increased in all directions as the foot COP moved forward, and more torque is generated in plantarflexion. Interestingly, the multi-directional ankle impedance during standing showed a similar shape and major tilt axes to the results of non-loaded scenarios. However, there were notable differences in the impedance amplitude when the ankle was not under bodyweight loading. Last, the stiffness during standing had similar amplitudes ranges to the time-varying ankle stiffness during the stance phase of dynamic walking estimated in previous studies. These results have implications on the design of new, less physically intense, biomechanics experiments aimed at people with neuromuscular disorders or other physical impairments who cannot complete a standard gait test.