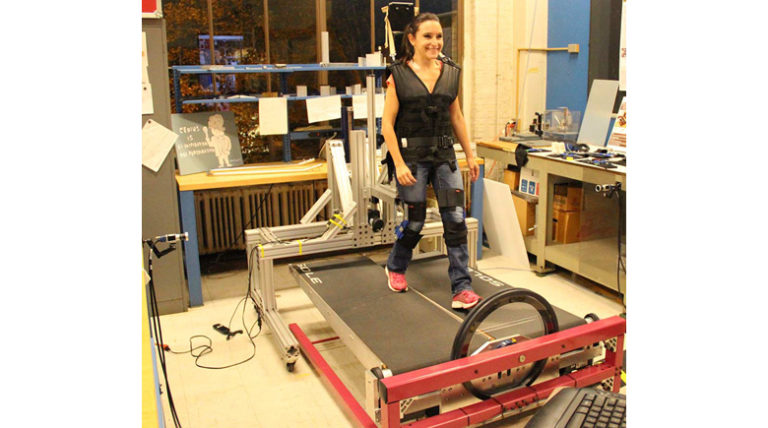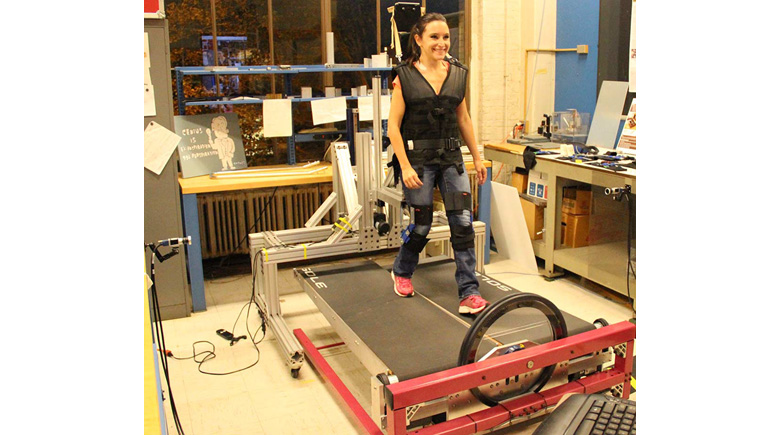
The MIT-Skywalker is a novel robotic device developed for the rehabilitation or habilitation of gait and balance after a neurological injury. It represents an embodiment of the concept exhibited by passive walkers for rehabilitation training. Its novelty extends beyond the passive walker quintessence to the unparalleled versatility among lower extremity devices. For example, it affords the potential to implement a novel training approach built upon our working model of movement primitives based on submovements, oscillations, and mechanical impedances. This translates into three distinct training modes: discrete, rhythmic, and balance. The system offers freedom of motion that forces self-directed movement for each of the three modes. This paper will present the technical details of the robotic system as well as a feasibility study done with one adult with stroke and two adults with cerebral palsy. Results of the one-month feasibility study demonstrated that the device is safe and suggested the potential advantages of the three modular training modes that can be added or subtracted to tailor therapy to a particular patient’s need. Each participant demonstrated improvement in common clinical and kinematic measurements that must be confirmed in larger randomized control clinical trials.