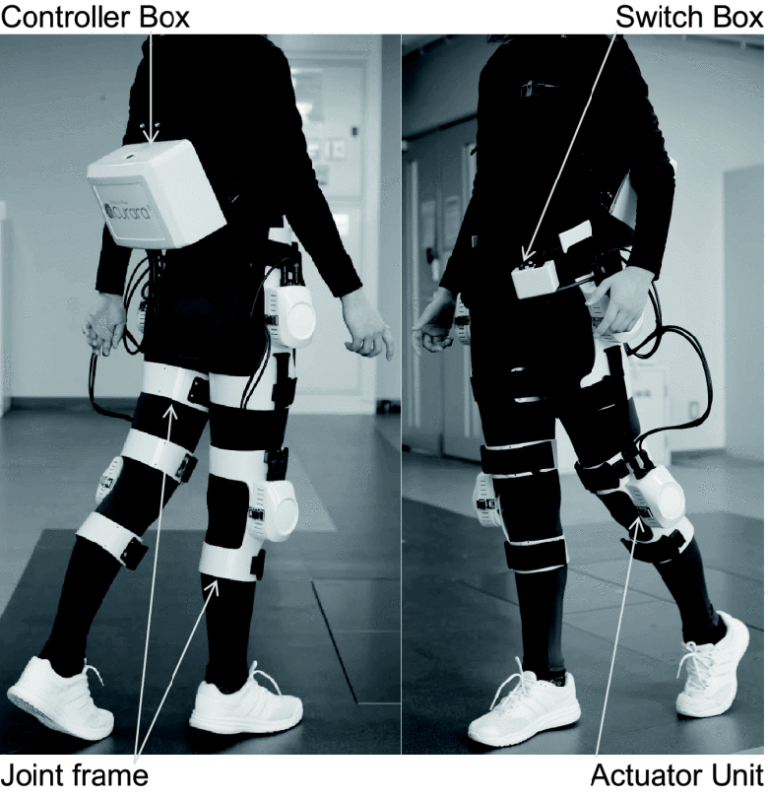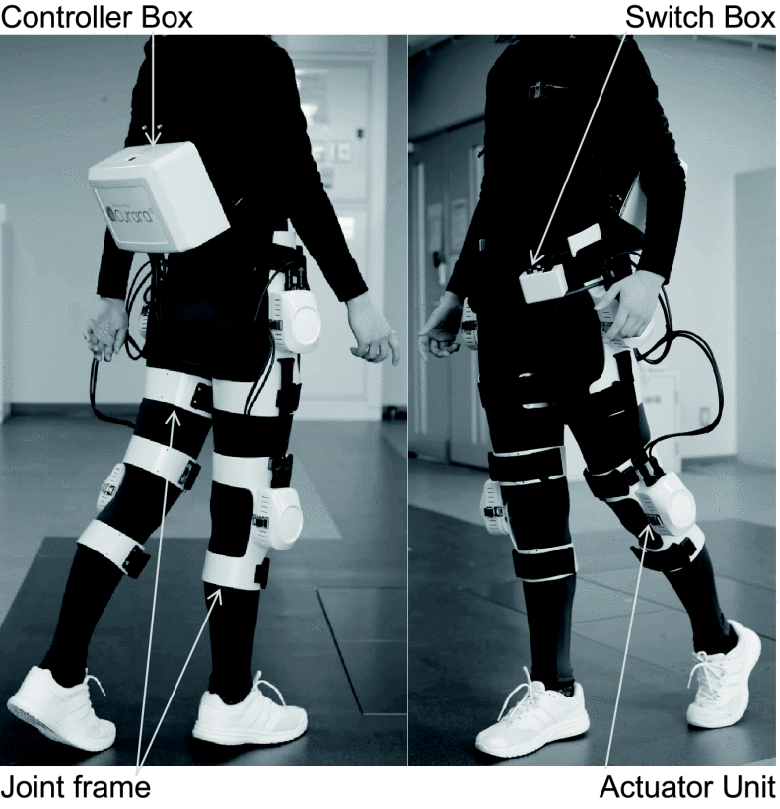
We have been developing the robotic wear curara as both a welfare device and rehabilitation robot that assists the elderly and disabled. curara is aimed at user friendliness. We have, thus, chosen a non-exoskeleton structure made of a plastic so that the robot is as light in weight as possible and to minimize the restraining stress against natural human movement. We verified the assistance effect of curara on 15 hemiplegic patients with stroke by comparing gait parameters (i.e., velocity, step length, cadence, and symmetry of joint angles) among three conditions. The conditions were “without assistance” (i.e., a control mode that cancels frictional resistances in actuators), Condition A (where joint angles are enlarged but there is no change in gait cycle), and Condition B (where there is no change in joint angles but the gait cycle is shortened). curara improved the walking velocity by 19% and 27% under Conditions A and B, respectively. Improvements in step length and cadence were, respectively, 11% and 7% under Condition A and 14% and 11% under Condition B. Moreover, the two assistance conditions reduced the difference in joint angles between unaffected and paralyzed legs. We consider that curara will facilitate the rehabilitation of stroke patients.