
Effect of the Synchronization-Based Control of a Wearable Robot Having a Non-Exoskeletal Structure on the Hemiplegic Gait of Stroke Patients
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2018/05/Effect-of-the-Synchronization-Based-Control-of-a-Wearable-Robot.png
780
809
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
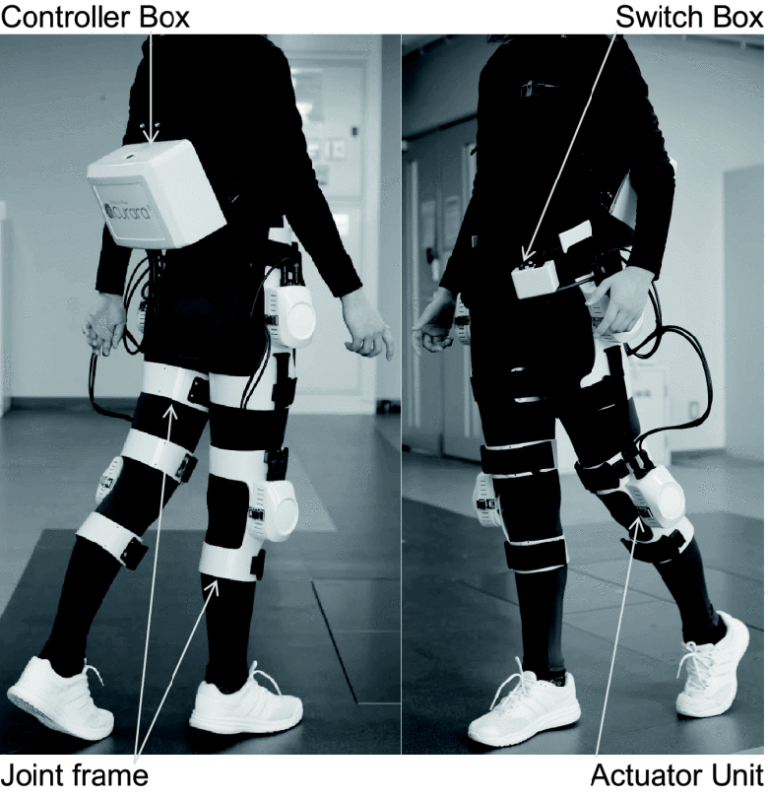
We have been developing the robotic wear curara as both a welfare device and rehabilitation robot that assists the elderly and disabled. curara is aimed at user friendliness. We…
read more