
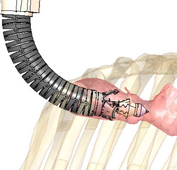

Aortic valve disease is the most common heart disease in the elderly, calling for replacement with artificial valves. The presented surgical robot aims to provide a highly controllable instrument for efficient delivery of an artificial valve under integrated endoscopic vision. The robot (called ValveTech) is intended for minimally invasive surgery (MIS) and consisting of a flexible cable driven manipulator, a passive arm, and a control unit completely designed and prototyped. The flexible manipulator has several features (e.g. stabilizing flaps and tiny cameras embedded laterally on the tip, dexterous introducer in the center and detachable custom valve cartridge) to help the proper valve placement. It provides 5 degrees of freedom for entering the chest from a right anterior mini-thoracotomy or hemi-sternotomy and reaching the operative site via transaortic approach. The ValveTech robot is designed to adjust the valve by translational and rotational motions of the introducer, and expands it at the optimal position in two phases under the surgeon control. The robot was evaluated by ten cardiac surgeons following a real surgical scenario in an artificial chest simulator with aortic mockup derived from real anatomies. Moreover, after each delivery, the expanded valve position was evaluated objectively in comparison with the ideal position. The robot performances were positively evaluated by surgeons. The trials resulted in faster delivery and an average misalignment distance of 3.8 mm along the aorta axis, 16.3 degrees rotational angle around aorta axis and 8.8 degrees misalignment of the valve commissure plane to the ideal plane were measured. The trials successfully proved the proposed system for valve delivery under endoscopic vision. The ValveTech robot can be an alternative solution for minimally invasive aortic valve surgery and improve the quality of the operation both for surgeons and patients.