
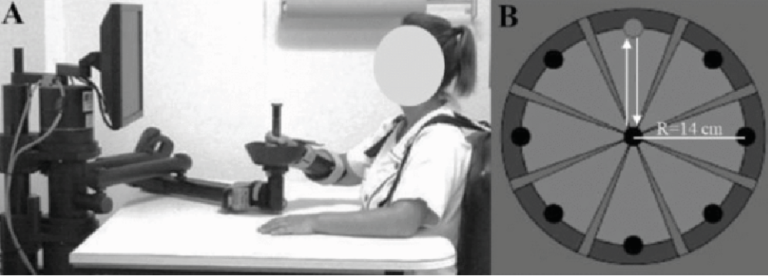
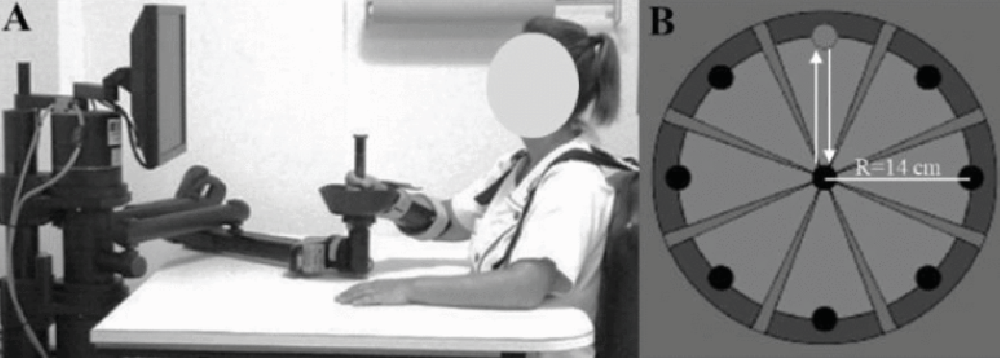
Robot-measured kinematic variables are increasingly used in neurorehabilitation to characterize motor recovery following stroke. However, few studies have evaluated the reliability of these kinematic variables. This study aimed at evaluating the test-retest reliability of typically-used robot-measured kinematic variables in healthy subjects (HS) and patients with stroke (SP). Sixty-one participants (40 HS, 21 SP) carried out a planar robot-pointing task on two consecutive days. Nine robot-measured kinematic variables were computed: movement time (T), mean velocity (mV), maximal velocity (MV), smoothness error (SE), number of velocity peaks (nP), mean arrest period ratio (MAPR), normalized path length (NPL), root mean square error (RMS) from a straight line and the orthogonal projection of the last point of movement (LP). Intraclass Correlation Coefficients (ICC), percentage of the Standard Error of Measurement (SEM measured as a percentage of the mean value of the variable (%SEM)) and percentage of the Minimum Detectable Difference (MDD measured as a percentage of the mean value of the variable (%MDD)) were used to analyze the test-retest reliability of the kinematic variables. ICC scores for all kinematic variables were above 0.75 in both groups. %SEM values were below 10% except for MAPR (13.4%) in HS and nP, MAPR and RMS in SP (13.0%, 11.7% and 15.2% respectively). %MDD values were higher for RMS in SP (42.1%) and MAPR in HS (37.1%) and lower for LP (1.6% in HS and 8.1% in SP). The nine robot-measured kinematic variables all demonstrated good reliability, with high ICC values (>0.75) and an acceptable level of measurement error (%SEM< 16%). However, 3/9 robot-measured kinematic variables, did not appear to be sufficiently sensitive to change (%MDD>30%) to be considered useful in patients with stroke.