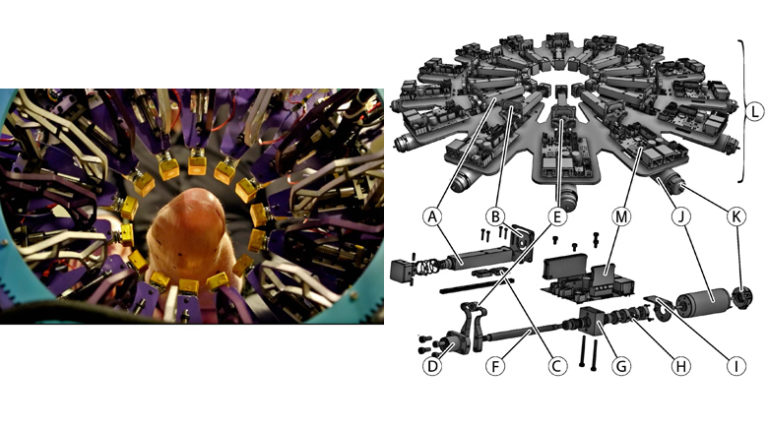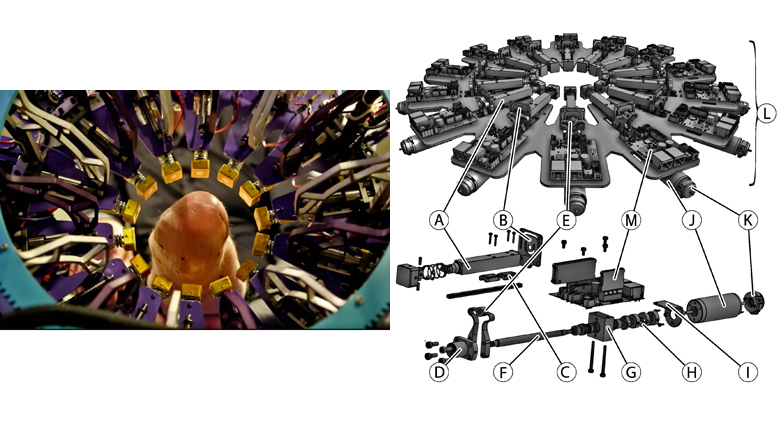
Biomechanical tissue properties have been hypothesized to play a critical role in the quantification of prosthetic socket production for individuals with limb amputation. In this investigation, a novel indenter platform is presented and its performance evaluated for the purposes of residual-limb tissue characterization. The indenter comprised 14 position- and force-controllable actuators that circumferentially surround a biological residuum to form an actuator ring. Each indenter actuator was individually controllable in position (97.1m accuracy) and force (330mN accuracy) at a PC controller feedback rate of 500Hz, allowing for a range of measurement across a residual stump. Data were collected from 162 sensors over an EtherCAT fieldbus to characterize the mechanical hyperviscoelastic tissue response of two transtibial residuallimbs from a study participant with bi-lateral amputations. At five distinct anatomical locations across the residual-limb, force versus deflection data — including hyperviscoelastic tissue properties — are presented, demonstrating the accuracy and versatility of the multi-indenter platform for residual-limb tissue characterization.