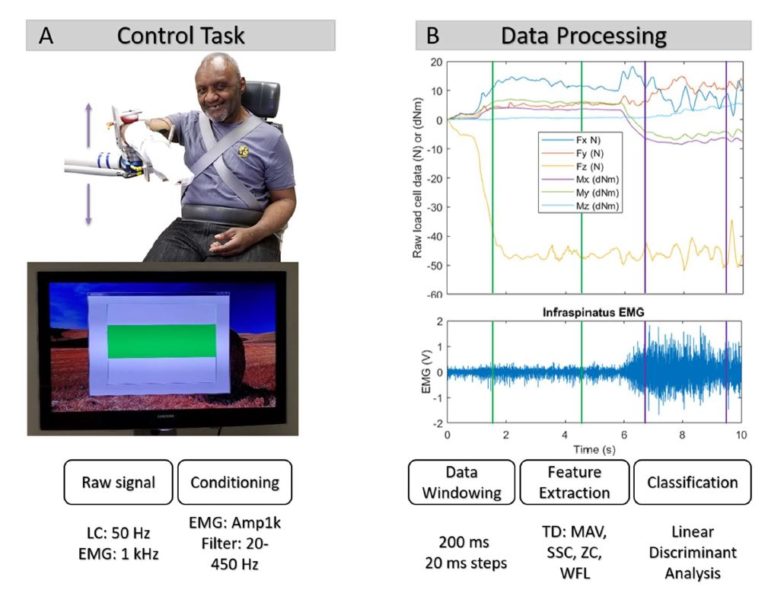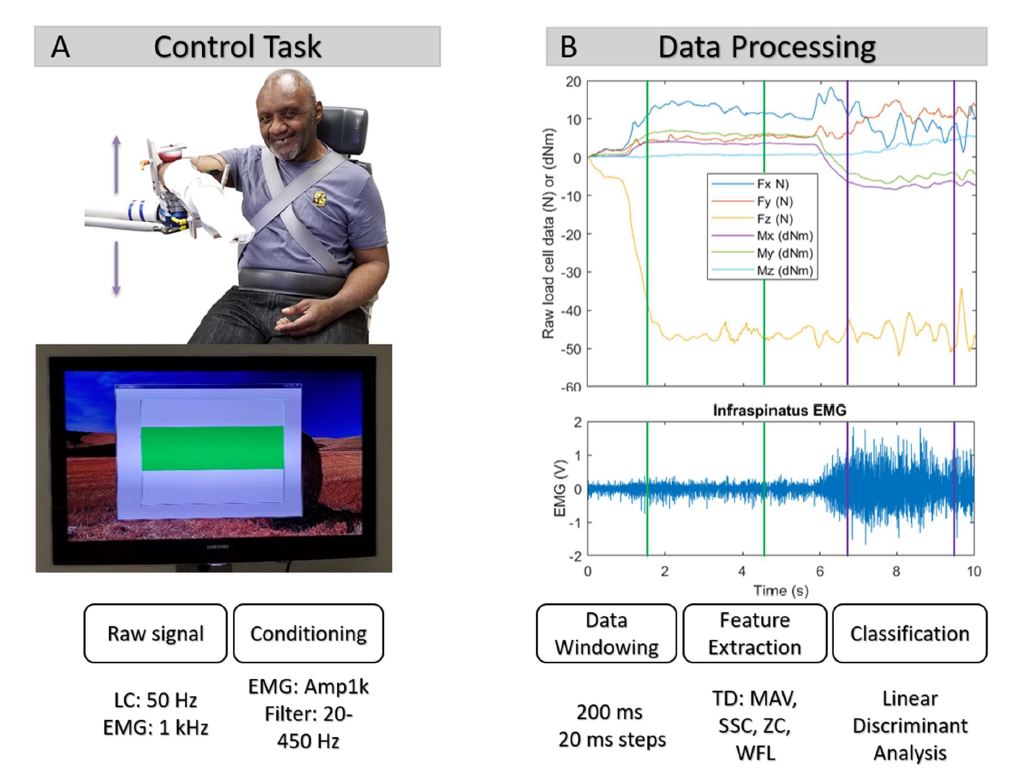
Stroke remains the leading cause of long-term disability in the US. Although therapy can achieve limited improvement of paretic arm use and performance, weakness and abnormal muscle synergies—which cause unintentional elbow, wrist, and finger flexion during shoulder abduction—contribute significantly to limb disuse and compound rehabilitation efforts. Emerging wearable exoskeleton technology could provide powered abduction support for the paretic arm, but requires a clinically feasible, robust control scheme capable of differentiating multiple shoulder degrees-of-freedom. This study examines whether pattern recognition of sensor data can accurately identify user intent for 9 combinations of 1- and 2- degree-of-freedom shoulder tasks. Participants with stroke (n = 12) used their paretic and non-paretic arms, and healthy controls (n = 12) used their dominant arm to complete tasks on a lab-based robot involving combinations of abduction, adduction, and internal and external rotation of the shoulder. We examined the effect of arm (paretic, non-paretic), load level (25% vs 50% maximal voluntary torque), and dataset (electromyography, load cell, or combined) on classifier performance. Results suggest that paretic arm, lower load levels, and using load cell or EMG data alone reduced classifier accuracy. However, this method still shows promise. Further work will examine classifier–user interaction during active control of a robotic device and optimization/minimization of sensors.