Plane Dependent Subject-Specific Neuromuscular Training for Knee Rehabilitation
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2020/08/9126858.png
920
724
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
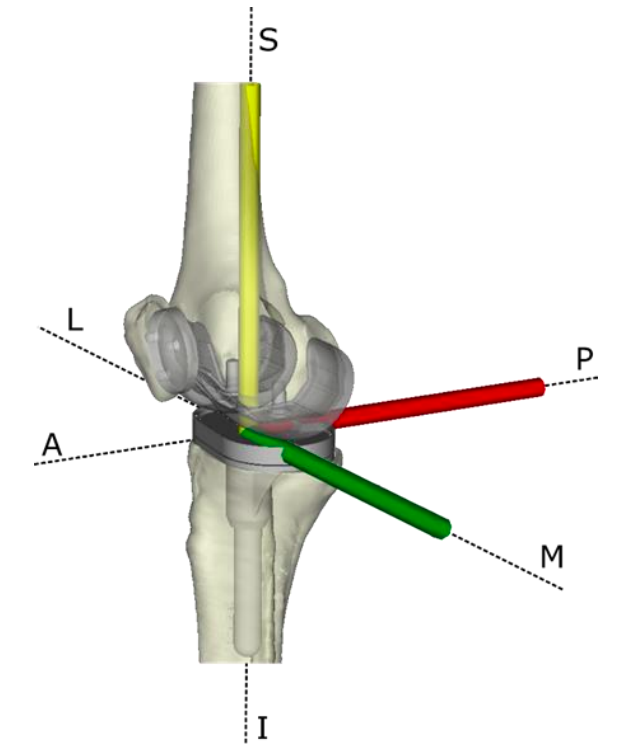
Knee injuries at risk of post-traumatic knee osteoarthritis (PTOA) and knee osteoarthritis (OA) are closely associated with knee transverse plane and/or frontal plane instability and excessive loading. However, most existing training and rehabilitation devices involve mainly movements in the sagittal plane.
read more