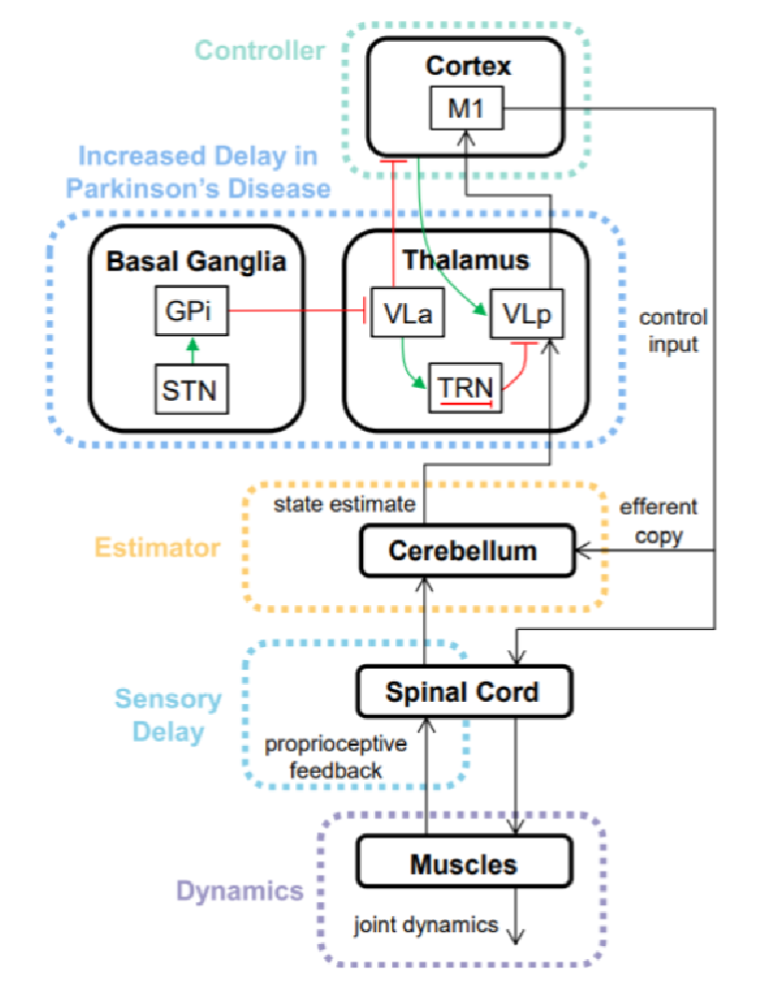
Optimal Control Perspective on Parkinson’s Disease: Increased Delay Between State Estimator and Controller Produces Tremor
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2020/09/TNSRE_OCTOBER-03.png
770
1000
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
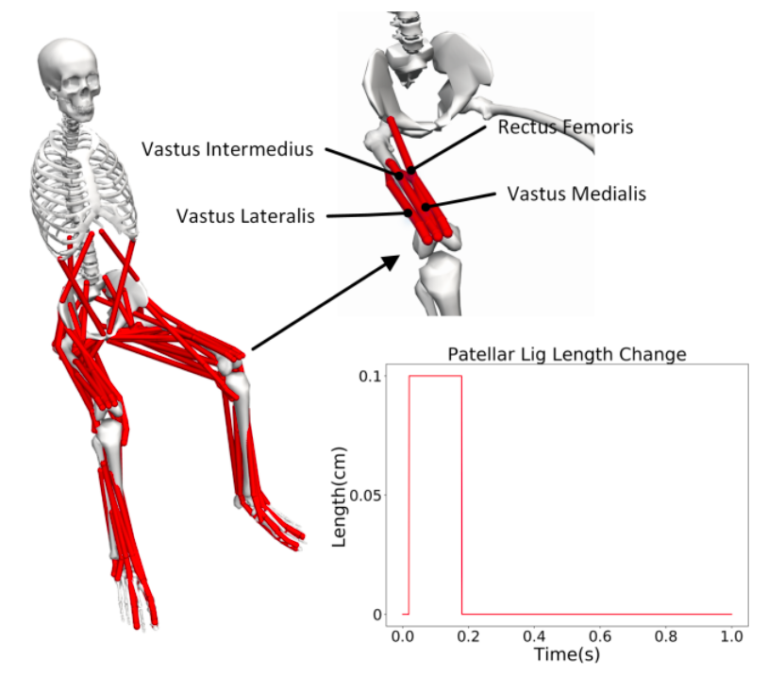
Parkinson’s disease produces tremor in a large subset of patients despite generally inhibiting movement. The pathophysiology of parkinsonian tremor is unclear, leading to uncertainty in how and why treatments reduce tremor with varying effectiveness. Models for parkinsonian tremor attempt to explain the underlying principles of tremor generation in the central nervous system, often focusing on neural activity of specific substructures.
read more