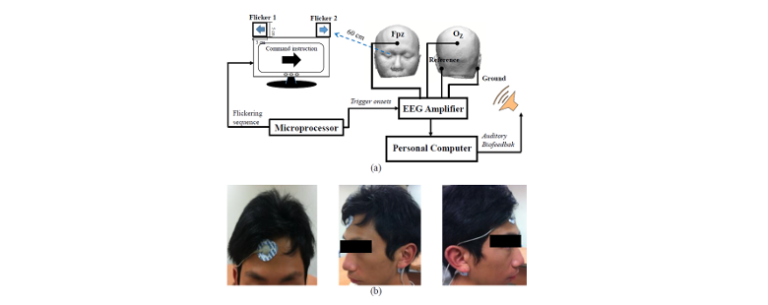
Evaluate the feasibility of using frontal SSVEP to implement an SSVEP – based BCI in Young, Elderly and ALS groups
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2016/05/07335644-feature.png
780
310
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
This paper studied the amplitude-frequency characteristic of frontal steady-state visual evoked potential (SSVEP) and its feasibility as a control signal for brain computer interface (BCI). SSVEPs induced by different stimulation…
read more