Open your Internet browser and search for videos showing the most advanced humanoid robots. Look at how they move and walk. Observe their motion and their interaction with the environment (the ground, users, target objects). Now, search for a video of your favorite sports player. Despite the undoubtedly great achievements of modern robotics, it will become quite evident that a lot of work still remains.
But perhaps there is one specific element that has been underestimated in the race to high-tech robots: the role of softness. In nature, soft tissues are widely exploited in effective, adaptable, and robust interaction with the environment. So why not in technology? In fact, the use of soft materials for building robots is now becoming popular. Many research groups worldwide are investigating this area, and publications in this field have rapidly grown in the last few years.
The scientific and technological challenges in this field embrace a number of disciplines (engineering, of course, but also biology and neuroscience as well as material science and chemistry), and scientists engaging in soft robotics are creating an active and fertile community. The IEEE Robotics and Automation Society supports a technical committee on soft robotics, and the European Commission is funding a Coordination Action on soft robotics, named RoboSoft.
Though this young research field still needs effort in developing basic enabling technologies—including actuators, sensors, smart materials, and control techniques—there is a wide landscape of possible applications for soft robots [1]. Soft robots are especially well suited in tasks where interaction is prominent. In this landscape, the biomedical field can benefit most from soft robotics technologies, especially in scenarios where robots are in direct contact with patients, such as surgery, rehabilitation, and assistance. Also, soft robotic technologies can effectively serve the purpose of building artificial organs or body parts, as simulators or prostheses.
Surgical AppliCations
Surgery is one of the most straightforward applications for soft robotics. In particular, soft, flexible, and variable-stiffness technologies may help in overcoming the current limitations of traditional rigid surgical tools. Flexibility and soft interaction with the environment (biological tissues) are important features for endoscopy, but they can be effective only if high forces can be generated when necessary; thus, a combination of soft robotics technologies should be adopted.
This is exactly the approach followed within the EU-funded STIFF-FLOP project, which aims at developing a new surgical tool able to elongate, bend in any direction, and selectively stiffen parts of its body. The main body of the manipulator is composed of silicone and lodges a series of internal chambers [2]. Three of them are empty and individually inflated to bend the manipulator in any direction, while the simultaneous inflation produces an elongation (Figure 1).
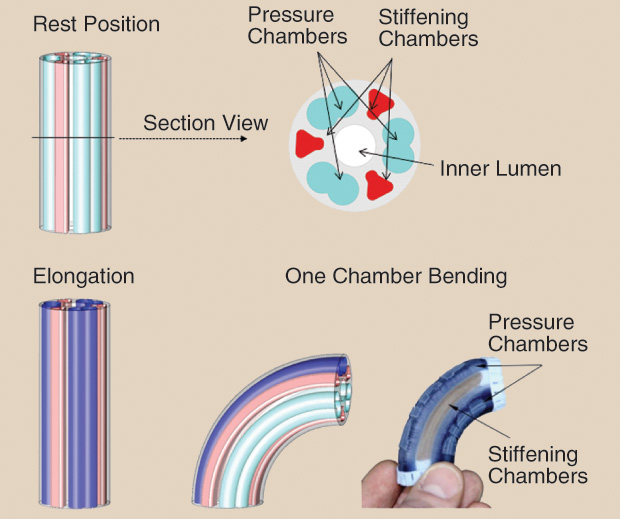
This technology (known as flexible fluidic actuators) has also been improved with a purposely designed containment method that optimizes the functionality of the actuation system. Dexterity is thus obtained by using only soft materials. The question is: How can one change the stiffness of the manipulator once the target is reached?
Selective stiffening is enabled by means of three other chambers housing a granular-jamming-based system (Figure 1). Granular jamming refers to the capability of granular material inside a densely packed elastic membrane to stiffen once a vacuum is applied. This is something very similar to what happens to coffee bags. On the market shelf, the package is light but very tough and rigid. Once air is allowed to flow in (a small cut on the bag is sufficient), the package suddenly becomes soft and flexible. The stiffening chambers of the manipulator are filled with granular material to implement this physical phenomenon.
Exploiting flexible fluidic actuators and granular jamming, different versions of a manipulator have been developed and tested in terms of mechanical performance (motion capabilities and force). The results obtained so far already demonstrate the enormous potential this approach can have on surgery. Not only is the manipulator able to almost double its length and cover a wide workspace with a good level of redundancy; the stiffening system also allows the ability to increase the rigidity of the device (up to +36%) and determine an increment of the applicable forces, opening new perspectives and operational capabilities for surgeons [3].
Applications in Assistive Technologies
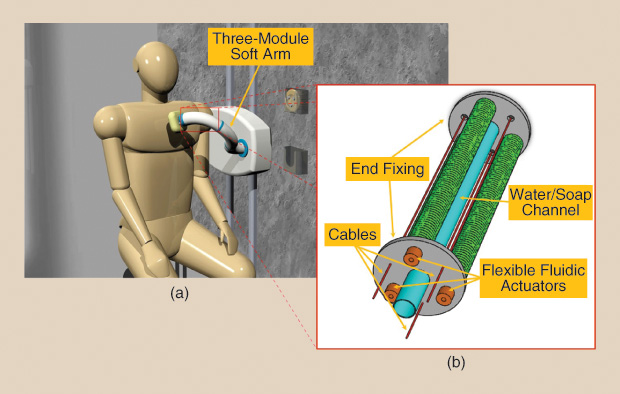
The aging population in most developed countries and the growing need for assistive technologies to promote active aging are driving the development of assistive robots for diverse daily life activities. Personal care is an ideal application field for soft robotics, as soft robots may offer independence and privacy to users while guaranteeing a safe and effective physical interaction. The EU-funded I-SUPPORT project is pursuing the development of a personal- care system, including a soft robot arm, for assisting elderly people in taking a shower. The arm hangs out from a wall in the shower space and softly wipes the person, pouring water and detergent.
The I-SUPPORT arm is composed of three modules (Figure 2), each of which has three longitudinal fluidic chambers and three longitudinal cables. Compressed air inflated in a chamber produces the actuator’s elongation and, because of its position, a bending of the module. Three chambers provide bending in all directions. The three cables also generate bending— in this case, by compression—and also increase the forces. The combined activation of the two actuation systems also generates antagonistic forces that increase the stiffness of the arm with no (or limited) deformations. I-SUPPORT is a multidisciplinary project, and the design follows a user-oriented approach, involving end users, i.e., the elderly and their caretakers, from the outset. The results of the project will then be validated with end users in realistic settings, i.e., rehabilitation centers in Italy and Germany.
Simulation Applications
Besides assisting patients and doctors in clinical tasks, soft robotics can also help medicine from a different perspective. Human body simulators are essential in medical training today, and soft robotics technologies can be useful in building more biomimetic systems, i.e., systems built with materials more similar to human tissues and with life-like contractions and movements. The human larynx, for example, is a complex human organ composed of many different parts, with varying compliance and many tiny movements. Anatomically, it is difficult to access and to study in vivo. A larynx simulator represents a helpful tool for studying this organ and the modifications in voice production given by changes in tissue compliance or morphology (Figure 3).
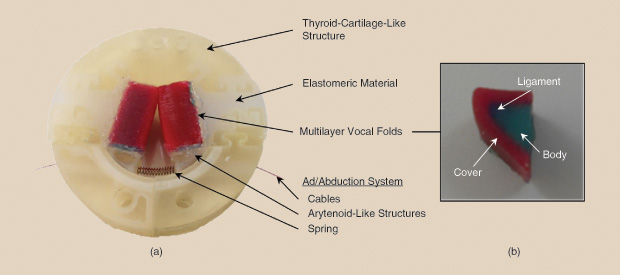
The core elements of the larynx, i.e., the vocal cords, can vibrate and produce sound thanks to the combination of three materials with different compliance arranged in layers. By tuning the mechanical properties of silicone, two biorobotic vocal cords have been built and actuated for their adduction/abduction [4]. Results show that the combination of vocal fold geometry, mechanical properties, and dimensions exhibits a vibration frequency and vertical displacements that are in the physiological range of human vocal cords.
A Softer Touch
Mastering the use of soft materials for building robots and devices that can greatly deform in a finely controlled way, as well as produce enough force for accomplishing tasks inside and outside the human body, would greatly improve the use of robots in the biomedical field. The potential for biomedical soft robots is huge, spanning exploration and operations inside the human body to replacing organs and limbs to creating wearable and assistive devices. Soft robotics can be the key for turning cold medical devices into conformable aids, pleasant to touch and to be touched by.
Acknowledgments
We would like to acknowledge the support by the European Commission through the STIFFFLOP project (#287728), the I-SUPPORT project (#643666), and the RoboSoft Coordination Action (#619319). Moreover, we gratefully acknowledge the support of the Italian Ministry of Foreign Affairs and International Cooperation DGSP-UST through the Joint Laboratory on Biorobotics Engineering project.
REFERENCES
- C. Laschi and M. Cianchetti, “Soft robotics: New perspectives for robot bodyware and control,” Frontiers Bioeng. Biotechnol., vol. 2, no. 3, Jan. 2014.
- M. Cianchetti, T. Ranzani, G. D. Gerboni, I. Falco, C. Laschi, and A. Menciassi, “STIFF-FLOP surgical manipulator: Mechanical design and experimental characterization of the single module,” in Proc. IEEE Conf. Intelligent and Robotic Systems (IROS), Tokyo, Japan, 2013, pp. 3567–3581.
- T. Ranzani, G. Gerboni, M. Cianchetti, and A. Menciassi, “A bioinspired soft manipulator for minimally invasive surgery,” Bioinspiration Biomimetics, vol. 10, p. 035008, May 2015.
- M. Manti, M. Cianchetti, A. Nacci, F. Ursino, and C. Laschi, “A biorobotic model of the human larynx,” in 27th Annu. Int. Conf. Engineering Medicine and Biology Society (EMBC), Milan, Italy, 2015, pp. 3623–3626.