
Abstract
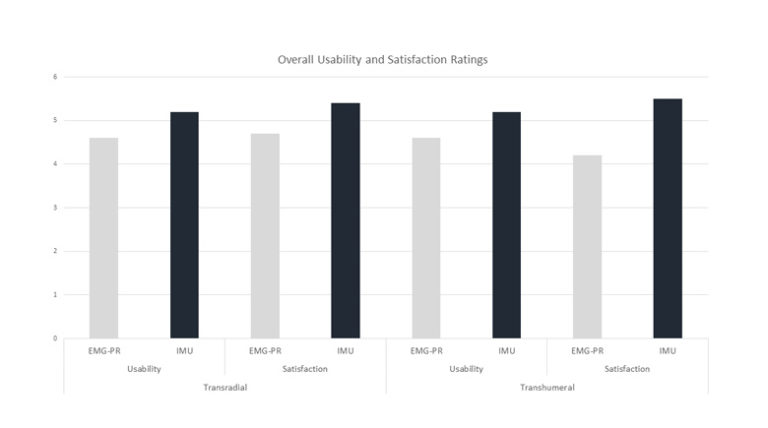
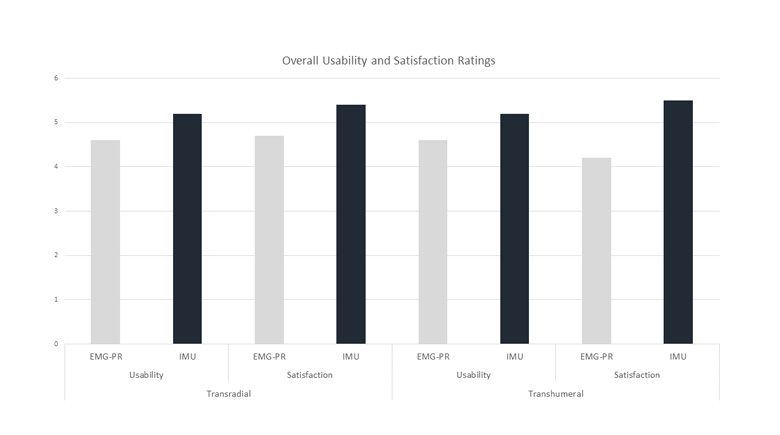
The DEKA Arm has multiple degrees of freedom which historically have been operated primarily by inertial measurement units (IMUs). However, the IMUs are not appropriate for all potential users; new control methods are needed. The purposes of this study were: 1) to describe usability and satisfaction of two controls methods—IMU and myoelectric pattern recognition (EMG-PR) controls—and 2) to compare ratings by control and amputation level. A total of 36 subjects with transradial (TR) or transhumeral (TH) amputation participated in the study. The subjects included 11 EMG-PR users (82% TR) and 25 IMU users (68% TR). The study consisted of in-laboratory training (Part A) and home use (Part B). The subjects were administered the Trinity Amputation and Prosthesis Experience satisfaction scale and other usability and satisfaction measures. Wilcoxon rank-sum tests compared the differences by control type. The differences were compared for those who did and did not want a DEKA Arm. The preferences for features of the DEKA Arm were compared by control type. The comparisons revealed poorer ratings of skill, comfort, and weight among EMG-PR users. The TR amputees using IMUs rated usability more favorably. TH amputees rated usability similarly. The TR amputees using EMG-PR were less satisfied with weight, pinch grip, and wrist display, whereas the TH amputees were less satisfied with the full system, wires/cables, and battery. Usability and satisfaction declined after Part B for EMG-PR users. Overall, we found that the IMU users rated the DEKA Arm and the controls more favorably than the EMG-PR users. The findings indicate that the EMG-PR system we tested was less well accepted than the IMUs for control of the DEKA Arm.