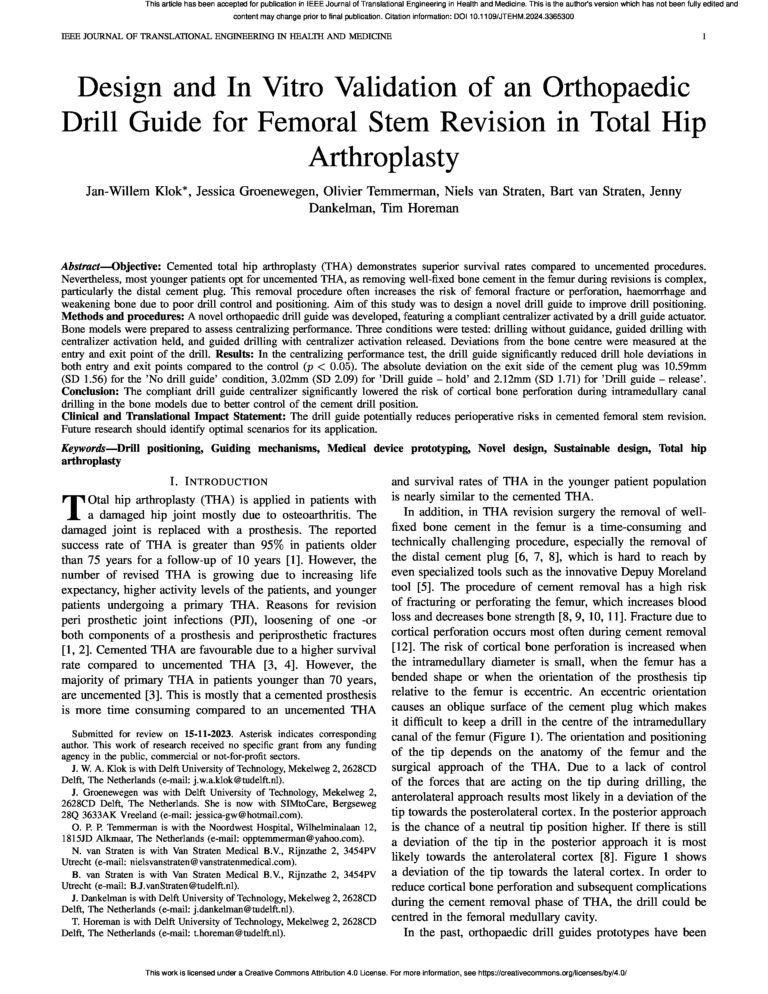
Design and In Vitro Validation of an Orthopaedic Drill Guide for Femoral Stem Revision in Total Hip Arthroplasty
https://www.embs.org/jtehm/wp-content/uploads/sites/17/2024/02/10433182-scaled.jpg
1978
2560
IEEE Journal of Translational Engineering in Health and Medicine (JTEHM)
//www.embs.org/jtehm/wp-content/uploads/sites/17/2022/06/ieee-jtehm-logo2x.png
Objective: Cemented total hip arthroplasty (THA) demonstrates superior survival rates compared to uncemented procedures. Nevertheless, most younger patients opt for uncemented THA, as removing well-fixed bone cement in the femur…
read more