
Abstract
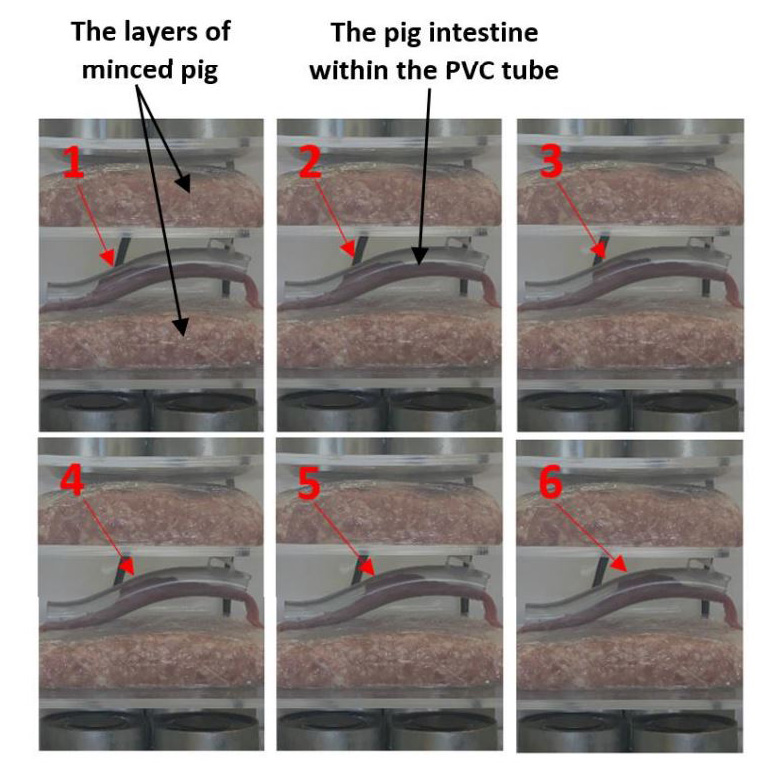
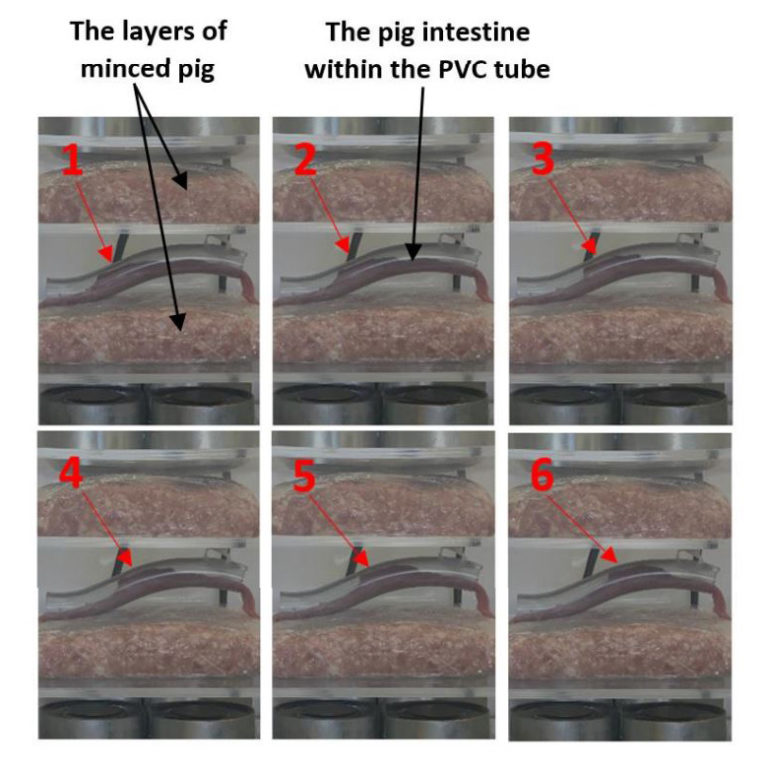
Conventional radiological and endoscopic techniques utilizing long tubes were ineffective in visualizing the small bowel mucosa until the development of Wireless Capsule Endoscopy (WCE). WCE is a revolutionary endoscopic technology that can diagnose the complete gastrointestinal (GI) tract. However, the existing capsule technologies are passive, and thus they cannot be navigated to or held in a specific location. The design of an active capsule will present the opportunity to move and stop a device at any targeted locations leading to numerous medical applications such as drug delivery or collecting tissue samples for examinations in the lab. This paper implements a new locomotion methodology for wireless capsule endoscopy systems using an electromagnetic platform. The platform produces a dynamic electromagnetic field (DEF) to control the motion of the capsule. The strength and the direction of the electromagnetic field that is generated by the platform are continuously adjusted in order to maintain the equilibrium state during the capsule movement. We present the detailed design of the proposed platform with an experimental setup with polyvinyl chloride (PVC) tubes and ex-vivo to demonstrate the performance of the capsule motion.