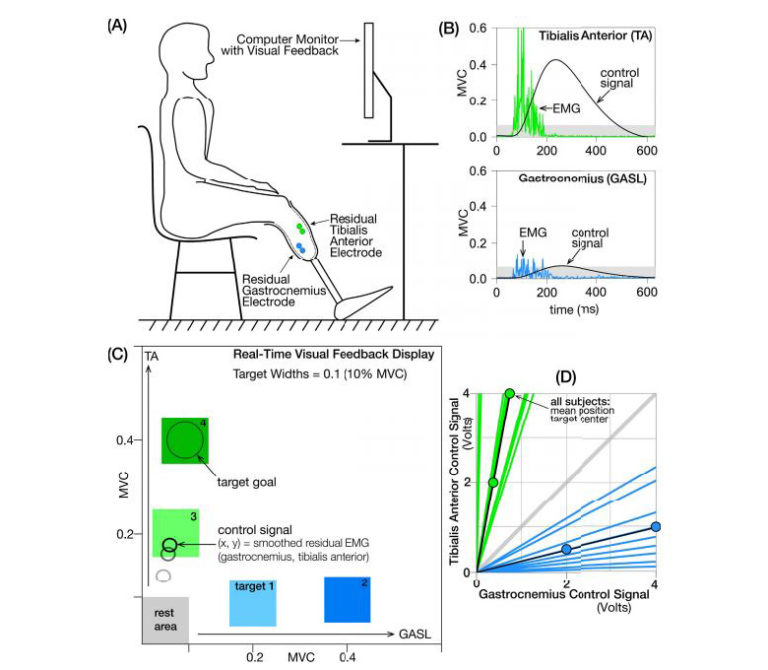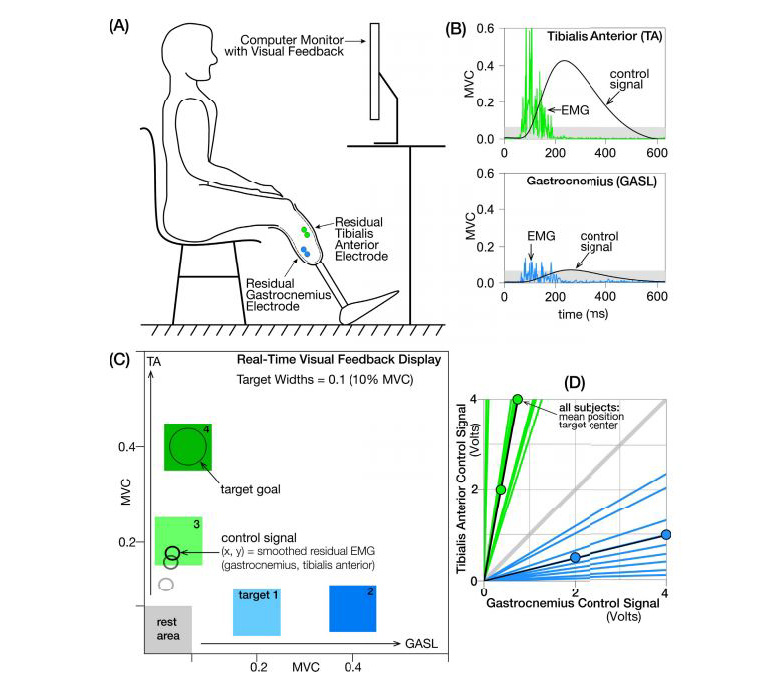
Discrete, rapid (i.e., ballistic like) muscle activation patterns have been observed in ankle muscles (i.e., plantar flexors and dorsiflexors) of able-bodied individuals during voluntary posture control. This observation motivated us to investigate whether transtibial amputees are capable of generating such a ballistic-like activation pattern accurately using their residual ankle muscles in order to assess whether the volitional postural control of a powered ankle prosthesis using proportional myoelectric control via residual muscles could be feasible. In this paper, we asked ten transtibial amputees to generate ballistic-like activation patterns using their residual lateral gastrocnemius and residual tibialis anterior to control a computer cursor via proportional myoelectric control to hit targets positioned at 20% and 40% of maximum voluntary contraction of the corresponding residual muscle. During practice conditions, we asked amputees to hit a single target repeatedly. During testing conditions, we asked amputees to hit a random sequence of targets. We compared movement time to target and end-point accuracy. We also examined motor recruitment synchronization via time-frequency representations of residual muscle activation. The result showed that median end-point error ranged from -0.6% to 1% maximum voluntary contraction across subjects during practice, which was significantly lower compared to testing (p <; 0.001). Average movement time for all amputees was 242 ms during practice and 272 ms during testing. Motor recruitment synchronization varied across subjects, and amputees with the highest synchronization achieved the fastest movement times. End-point accuracy was independent of movement time. Results suggest that it is feasible for transtibial amputees to generate ballistic control signals using their residual muscles. Future work on volitional control of powered power ankle prostheses might consider anticipatory postural control based on ballistic-like residual muscle activation patterns and direct continuous proportional myoelectric control.