
Abstract
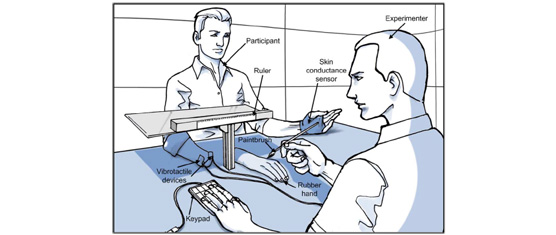
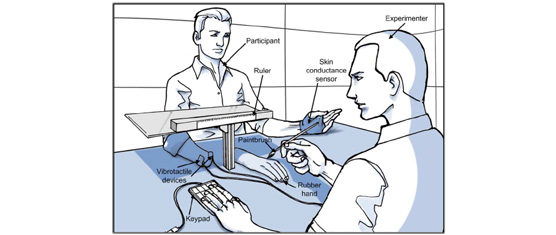
Tactile feedback is essential to intuitive control and to promote the sense of self-attribution of a prosthetic limb. Recent findings showed that amputees can be tricked to experience this embodiment, when synchronous and modality-matched stimuli are delivered to biological afferent structures and to an alien rubber hand. Hence, it was suggested to exploit this effect by coupling touch sensors in a prosthesis to an array of haptic tactile stimulators in the prosthetic socket. However, this approach is not clinically viable due to physical limits of current haptic devices. To address this issue we have proposed modality-mismatched stimulation and demonstrated that this promotes self-attribution of an alien hand on normally limbed subjects. In this work we investigated whether similar effects could be induced in transradial amputees with referred phantom sensations in a series of experiments fashioned after the Rubber Hand Illusion using vibrotactile stimulators. Results from three independent measures of embodiment demonstrated that vibrotactile sensory substitution elicits body-ownership of a rubber hand in transradial amputees. These results open up promising possibilities in this field; indeed miniature, safe and inexpensive vibrators could be fitted into commercially available prostheses and sockets to induce the illusion every time the prosthesis manipulates an object.