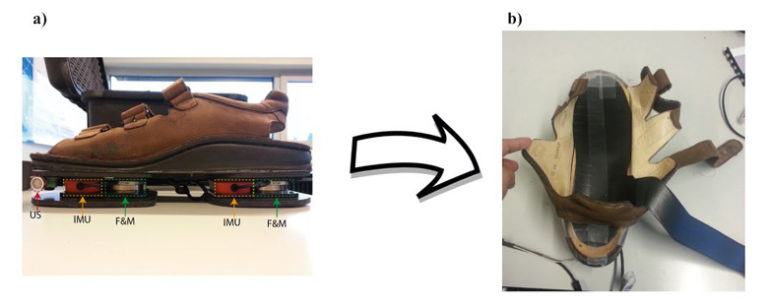
Gait and Dynamic Balance Sensing Using Wearable Foot Sensors
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2019/01/Gait-and-Dynamic-Balance.jpg
780
313
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
Remote monitoring of gait performance offers possibilities for objective evaluation, and tackling impairment in motor ability, gait, and balance in populations such as elderly, stroke, multiple sclerosis, Parkinson’s, etc.…
read more