Self-feeding kinematics in an ecological setting: typically developing children and children with cerebral palsy
https://www.embs.org/tnsre/wp-content/themes/movedo/images/empty/thumbnail.jpg
150
150
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
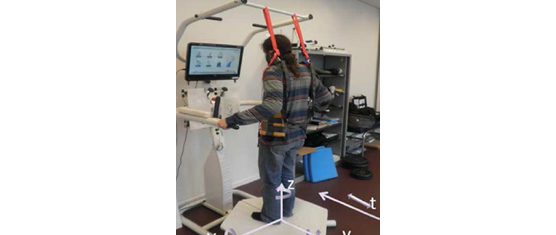
Assessment of self-feeding kinematics is seldom performed in an ecological setting. In preparation for development of an instrumented spoon for measurement of self-feeding in children with cerebral palsy (CP), the…
read more