
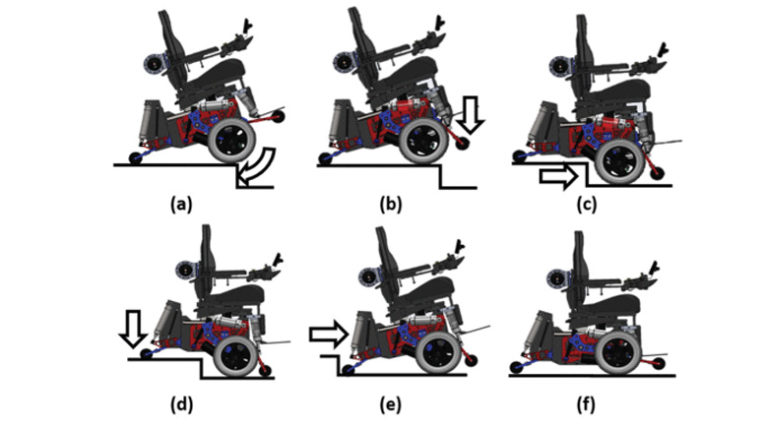
A Heuristic Approach to Overcome Architectural Barriers Using a Robotic Wheelchair
https://www.embs.org/tnsre/wp-content/uploads/sites/15/2019/09/coope9abcdef-2934387-small.jpg
780
435
Transactions on Neural Systems and Rehabilitation Engineering (TNSRE)
//www.embs.org/tnsre/wp-content/uploads/sites/15/2022/06/ieee-tnsre-logo2x.png
<em The Mobility Enhancement roBotic (MEBot) wheelchair was developed to improve the safety and accessibility of wheelchair users when facing architectural barriers. MEBot uses pneumatic actuators attached to its frame…
read more