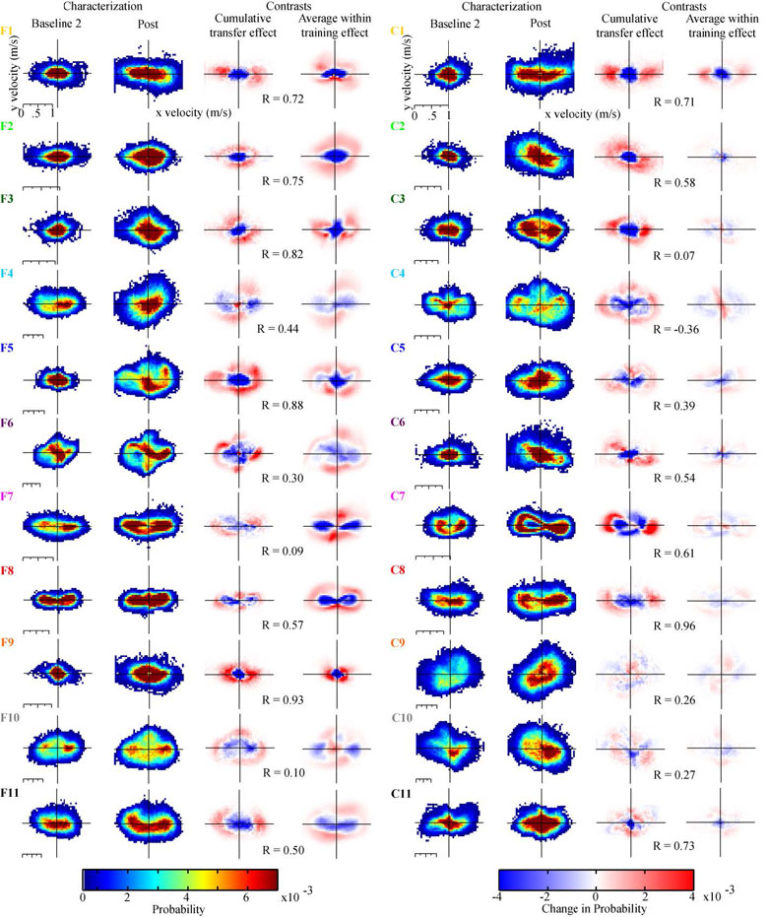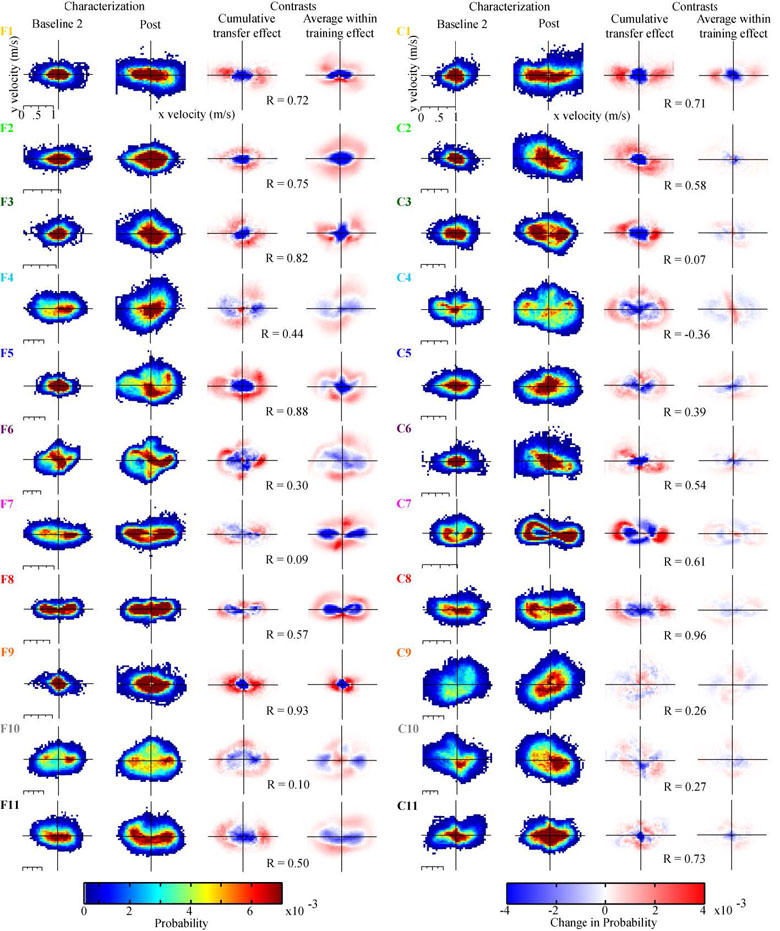
The wide variation in upper extremity motor impairments among stroke survivors necessitates more intelligent methods of customized therapy. However, current strategies for characterizing individual motor impairments are limited by the use of traditional clinical assessments (e.g. Fugl-Meyer) and simple engineering metrics (e.g. goal-directed performance). Our overall approach is to statistically identify the range of volitional movement capabilities, and then apply a robot-applied force vector field intervention that encourages under-expressed movements. We investigated whether explorative training with such customized force fields would improve stroke survivors’ (n = 11) movement patterns in comparison to a control group that trained without forces (n = 11). Force and Control groups increased Fugl-Meyer UE scores (average of 1.0 and 1.1, respectively), which is not considered clinically meaningful. Interestingly, participants from both groups demonstrated dramatic increases in their range of velocity during exploration following only six days of training (average increase of 166.4% and 153.7% for the Force and Control group, respectively). While both groups showed evidence of improvement, we also found evidence that customized forces affected learning in a systematic way. When customized forces were active, we observed broader distributions of velocity that were not present in the controls. Secondly, we found that these changes led to specific changes in unassisted motion. In addition, while the shape of movement distributions changed significantly for both groups, detailed analysis of the velocity distributions revealed that customized forces promoted a greater proportion of favorable changes. Taken together, these results provide encouraging evidence that patient-specific force fields based on individuals’ movement statistics can be used to create new movement patterns and shape them in a customized manner. To our knowledge, this study is the first to directly link engineering assessments of stroke survivors’ exploration movement behaviors to the design of customized robot therapy.