
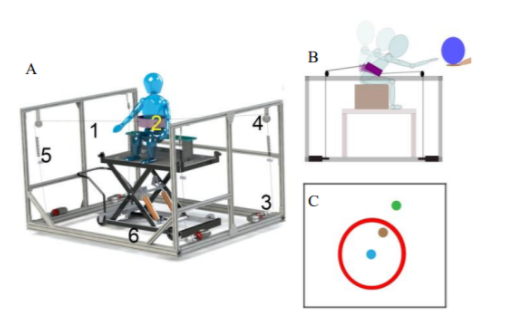
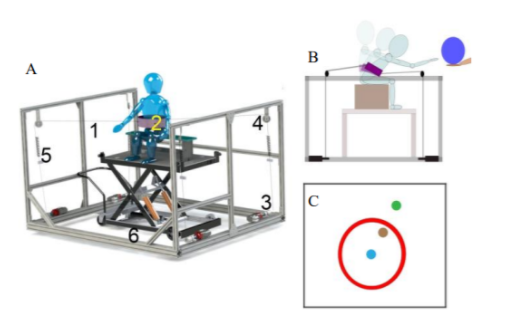
TruST is a motorized-cable driven belt placed on the child’s trunk to exert active-assistive forces when the trunk moves beyond stability limits. TruST-intervention addresses postural-task progression by tailoring the assistive-force fields to the child’s sitting balance to train trunk control during independent short-sitting posture. TruST-intervention consisted of 2 training blocks of 6 2hour-sessions per block (3 sessions per week). Pelvic strapping was required in the 1st block to prevent falls. As primary outcomes, we used the modified functional reach test, gross motor function measure-item set (GMFM-IS), Box & Blocks, and postural kinematics. After TruST-intervention children did not require pelvic strapping to prevent a fall, improved trunk stability during reaching (baseline = 5.49cm, 1week post-training = 16.38cm, 3mos follow-up = 14.63cm, p < 0.001) and increased their sitting workspace (baseline = 127.55cm2, 1week post-training, = 409.92cm2, 3mos follow-up = 270.03cm2, p < 0.001). Three children also improved in the GMFM-IS. In summary, our novel robotic TruST-intervention is feasible and can effectively maximize functional independent sitting in children with CP GMFCS III-IV.