
Hebert, J.S. ; Olson, J.L. ; Morhart, M.J. ; Dawson, M.R. ; Marasco, P.D. ; Kuiken, T.A. ; Chang, K.M.
Abstract
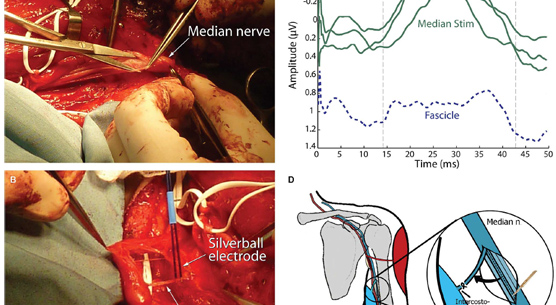
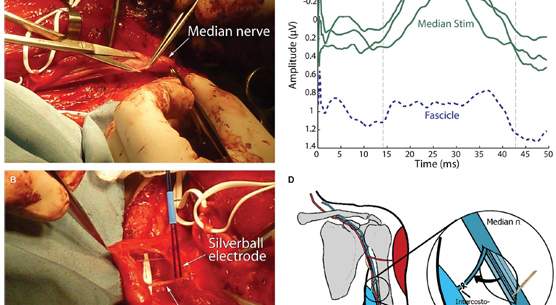
We present a case study of a novel variation of the targeted sensory reinnervation technique that provides additional control over sensory restoration after transhumeral amputation. The use of intraoperative somatosensory evoked potentials on individual fascicles of the median and ulnar nerves allowed us to specifically target sensory fascicles to reroute to target cutaneous nerves at a distance away from anticipated motor sites in a transhumeral amputee. This resulted in restored handmaps of themedian and ulnar nerve in discrete spatially separated areas. In addition, the subject was able to use native and reinnervated muscle sites to control a robotic arm while simultaneously sensing touch and force feedback from the robotic gripper in a physiologically correct manner. This proof of principle study is the first to demonstrate the ability to have simultaneous dual flow of information (motor and sensory) within the residual limb. In working towards clinical deployment of a sensory integrated prosthetic device, this surgical method addresses the important issue of restoring a usable access point to provide natural hand sensation after upper limb amputation.