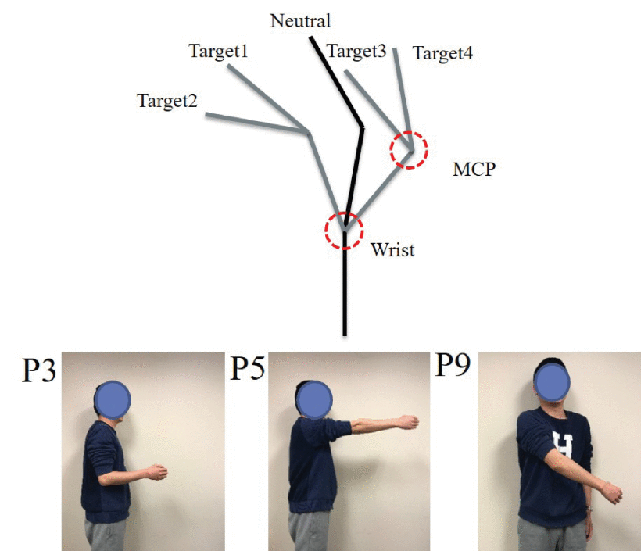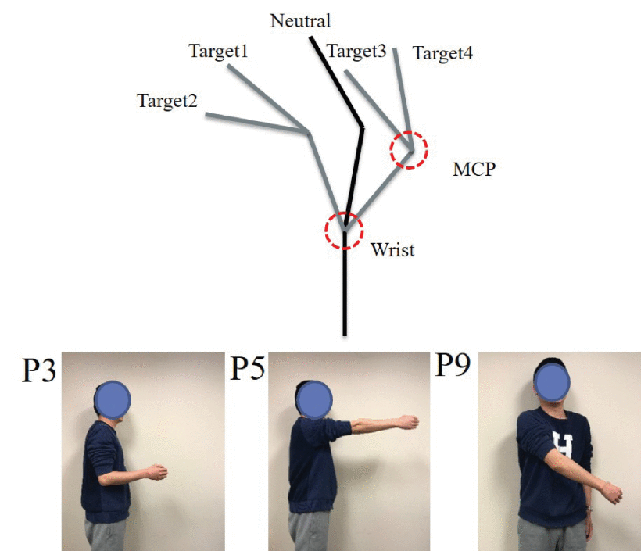
This paper aimed to develop a novel electromyography (EMG)-based neural-machine interface (NMI) that is user-generic for continuously predicting coordinated motion between metacarpophalangeal (MCP) and wrist flexion/extension. The NMI requires a minimum calibration procedure that only involves capturing maximal voluntary muscle contraction for the monitored muscles for individual users. At the center of the NMI is a user-generic musculoskeletal model based on the experimental data collected from six able-bodied (AB) subjects and nine different upper limb postures. The generic model was evaluated on-line on both AB subjects and a transradial amputee. The subjects were instructed to perform a virtual hand/wrist posture matching task with different upper limb postures. The on-line performance of the generic model was also compared with that of the musculoskeletal model customized to each individual user (called “specific model”). All subjects accomplished the assigned virtual tasks while using the user-generic NMI, although the AB subjects produced better performance than the amputee subject. Interestingly, compared with the specific model, the generic model produced comparable completion time, a reduced number of overshoots, and improved path efficiency in the virtual hand/wrist posture matching task. The results suggested that it is possible to design an EMG-driven NMI based on a musculoskeletal model that could fit multiple users, including upper limb amputees, for predicting coordinated MCP and wrist motion. The present new method might address the challenges of existing advanced EMG-based NMI that require frequent and lengthy customization and calibration. Our future research will focus on evaluating the developed NMI for powered prosthetic arms.