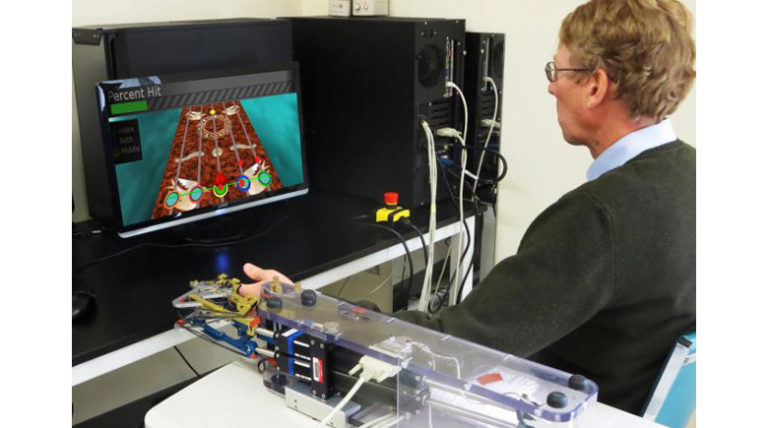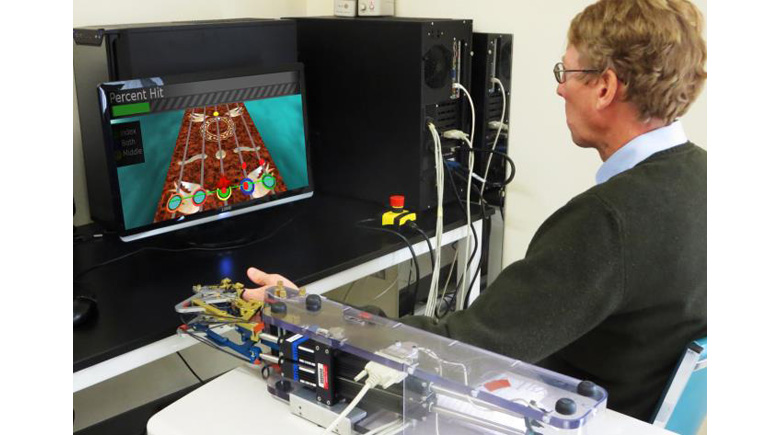
Brain-computer interfacing is a technology that has the potential to improve patient engagement in robot-assisted rehabilitation therapy. For example, movement intention reduces mu (8-13 Hz) oscillation amplitude over the sensorimotor cortex, a phenomenon referred to as event-related desynchronization (ERD). In an ERD-contingent assistance paradigm, initial BCI-enhanced robotic therapy studies have used ERD to provide robotic assistance for movement. Here we investigated how ERD changed as a function of audio-visual stimuli, overt movement from the participant, and robotic assistance. Twelve unimpaired subjects played a computer game designed for rehabilitation therapy with their fingers using the FINGER robotic exoskeleton. In the game, the participant and robot matched movement timing to audio-visual stimuli in the form of notes approaching a target on the screen set to the consistent beat of popular music. The audio-visual stimulation of the game alone did not cause ERD, before or after training. In contrast, overt movement by the subject caused ERD, whether or not the robot assisted the finger movement. Notably, ERD was also present when the subjects remained passive and the robot moved their fingers to play the game. This ERD occurred in anticipation of the passive finger movement with similar onset timing as for the overt movement conditions. These results demonstrate that ERD can be contingent on expectation of robotic assistance; that is, the brain generates an anticipatory ERD in expectation of a robot-imposed but predictable movement. This is a caveat that should be considered in designing BCIs for enhancing patient effort in robotically-assisted therapy.