
Cipriani, C. ; Segil, J. L. ; Birdwell, A. J. ; Weir, R. F
Abstract
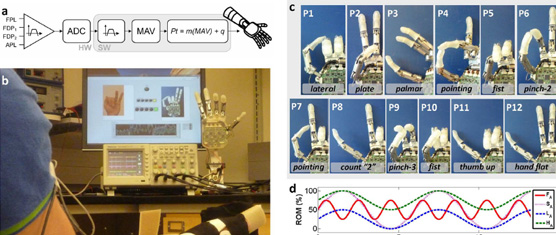
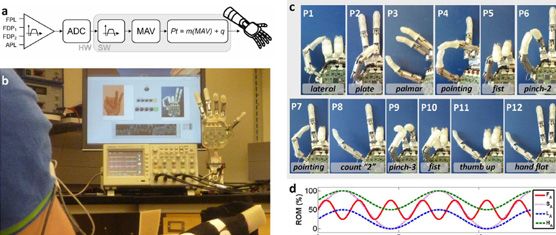
Restoring dexterous motor function equivalent to that of the human hand after amputation is one of the major goals in rehabilitation engineering. To achieve this requires the implementation of a effortless human-machine interface that bridges the artificial hand to the sources of volition. Attempts to tap into the neural signals and to use them as control inputs for neuroprostheses range in invasiveness and hierarchical location in the neuromuscular system. Nevertheless today, the primary clinically viable control technique is the electromyogram measured peripherally by surface electrodes. This approach is neither physiologically appropriate nor dexterous because arbitrary finger movements or hand postures cannot be obtained. Here we demonstrate the feasibility of achieving real-time, continuous and simultaneous control of a multi-digit prosthesis directly from forearm muscles signals using intramuscular electrodes on healthy subjects. Subjects contracted physiologically appropriate muscles to control four degrees of freedom of the fingers of a physical robotic hand independently. Subjects described the control as intuitive and showed the ability to drive the hand into 12 postures without explicit training. This is the first study in which peripheral neural correlates were processed in real-time and used to control multiple digits of a physical hand simultaneously in an intuitive and direct way.