
Abstract
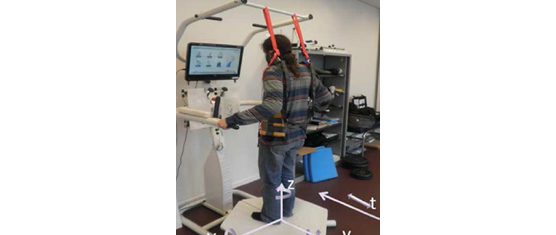
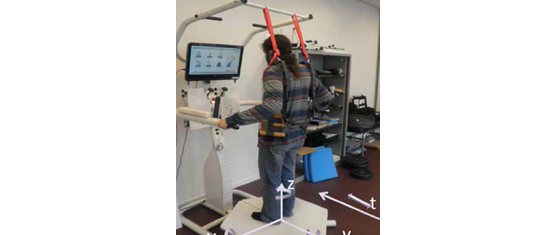
This paper presents the design and implementation of IsiMove, a new dynamic posturography platform. It allows the evaluation of the static and dynamic balance of a human placed on a force plate. IsiMove is a robotic platform open kinematic with four degrees of freedom: anteroposterior tilt,mediolateral tilt, vertical rotation, and horizontal translation. It is capable of measuring the displacement of the center of pressure over time, with a resolution of 0.1 mm for each foot and support a human of about 120 kg. IsiMove can generate various types of balance perturbations based on parameters such as direction, amplitude, frequency and shape. In this paper, we will give a description of the mechanisms that constitute our platform. First, the technical specifications of the hardware and software architecture will be presented. Then, we will provide details related to extensive experimental evaluations of the platform in both static and dynamic condition as well as result of postural stability analysis with healthy subjects and stroke patients.