
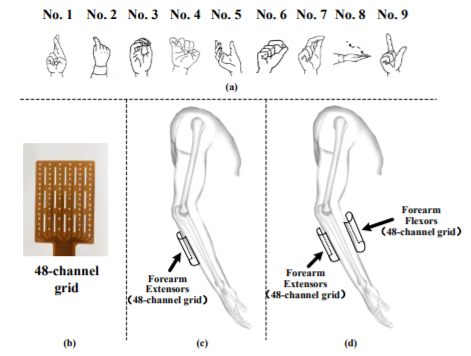
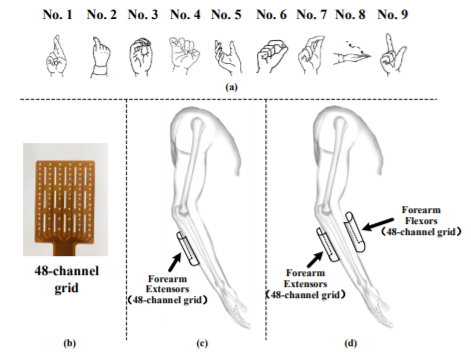
In the proposed method, the high-density surface electromyography (HD-sEMG) matrix collected during hand gesture execution is decomposed into a source signal matrix and mixed coefficient matrix by fast independent component analysis algorithm firstly. The mixed coefficient vector whose source signal has the largest two-norm energy is selected as the major pattern, and core activation region of muscles is extracted by traversing the major pattern periodically using a sliding window. The electrode calibration is realized by aligning the core activation regions in an unsupervised way. Gestural HD-sEMG data collection experiments with known and unknown electrode shifts are carried out on 9 gestures and 11 participants. A CNN+LSTM-based network is constructed and two network training strategies are adopted for the recognition task. The experimental results demonstrate the effectiveness of the proposed method in mitigating the bad effect of electrode shifts on gesture recognition accuracy and the potentials in reducing user training burden of myoelectric control systems. With the proposed electrode calibration method, the overall gesture recognition accuracies increase about (5.72∼7.69)%. In specific, the average recognition accuracy increases (13.32∼17.30)% when using only one batch of data in data diversity strategy, and increases (12.01∼13.75)% when using only one repetition of each gesture in model update strategy. The proposed electrode calibration algorithm can be extended and applied to improve the robustness of myoelectric control systems.