
J. T. Heaton, C. J. Knox, J. S. Malo, J. B. Kobler, and T. A. Hadlock
Abstract
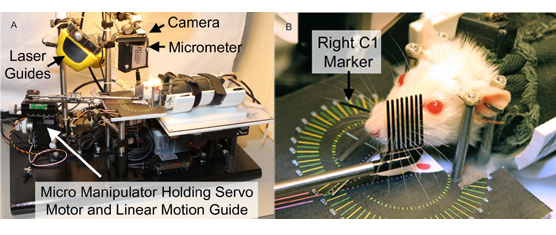
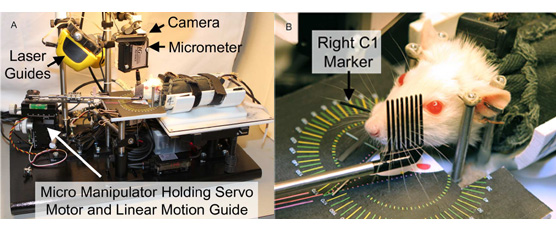
Functional recovery is typically poor after facial nerve transection and surgical repair. In rats, whisking amplitude remains greatly diminished after facial nerve regeneration, but can recover more completely if the whiskers are periodically mechanically stimulated during recovery. Here we present a robotic “whisk assist” system for mechanically driving whisker movement after facial nerve injury. Movement patterns were either preprogrammed to reflect natural amplitudes and frequencies, or movements of the contralateral (healthy) side of the face were detected and used to control real-time mirror-like motion on the denervated side. In a pilot study, 20 rats were divided into nine groups and administered one of eight different whisk assist driving patterns (or control) for 5–20 minutes, five days per week, across eight weeks of recovery after unilateral facial nerve cut and suture repair. All rats tolerated the mechanical stimulation well. Seven of the eight treatment groups recovered average whisking amplitudes that exceeded controls, although small group sizes precluded statistical confirmation of group differences. The potential to substantially improve facial nerve recovery through mechanical stimulation has important clinical implications, and we have developed a system to control the pattern and dose of stimulation in the rat facial nerve model.